Research Area: Robot Learning
-
Towards Leveraging Humans’ Implicit Interaction Cues for Fluent Human-Humanoid Interaction
Abstract Humanoid robots in shared environments are increasingly expected to interact naturally by interpreting implicit human interaction cues, such as gradual deceleration or torso reorientation that signal emerging engagement. However, existing humanoid systems primarily rely on explicit recognition (e.g., only start or stop after the interactant’s initial or final body pose) and lack mechanisms to…
-
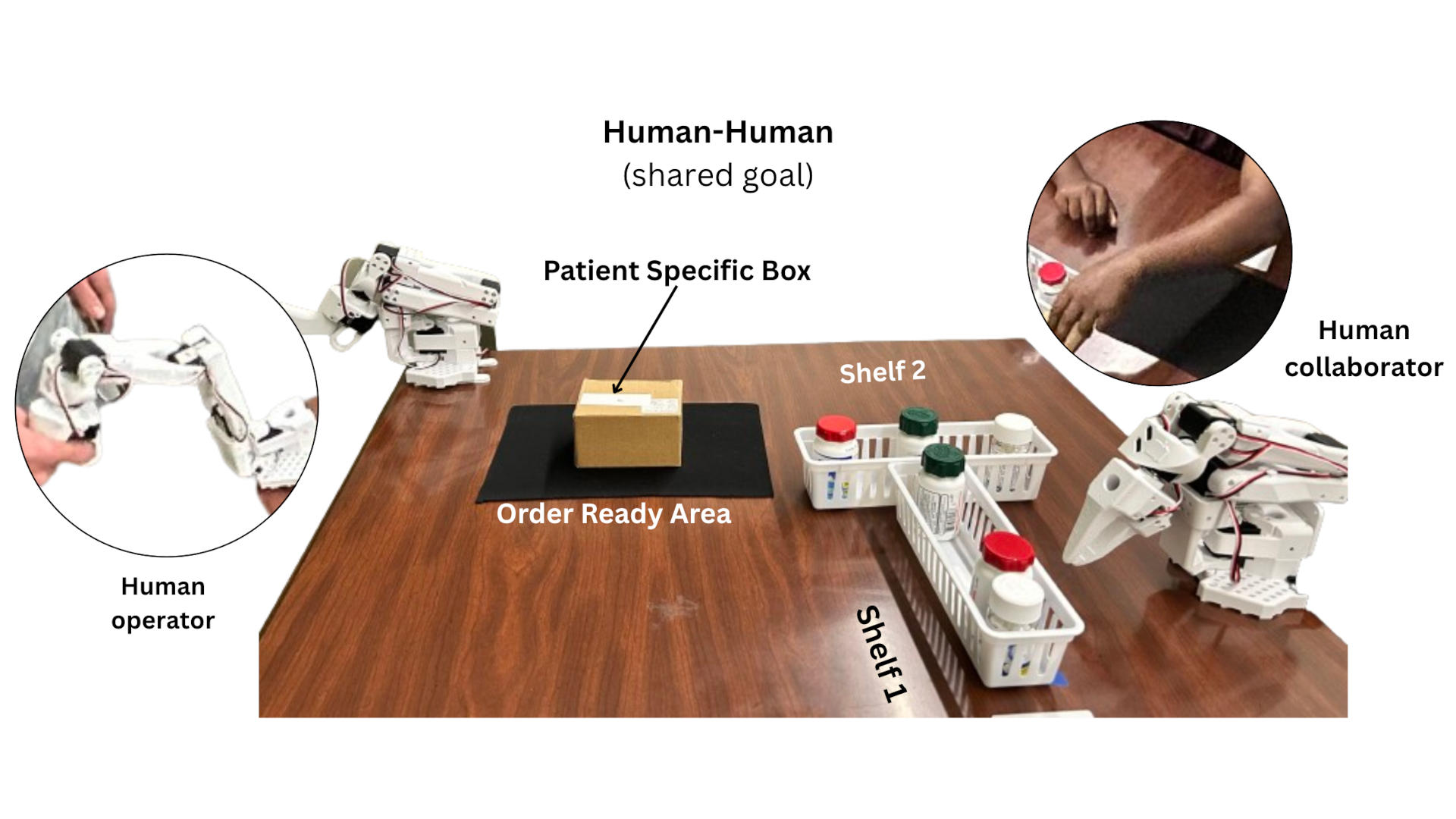
Towards Embodied Agent Intent Explanation in Human-Robot Collaboration: ACT Error Analysis and Solution Conceptualization
Abstract Collaborative robots must not only perform competently but also communicate their intents transparently to ensure safety and efficiency in shared task environments. However, state-of-the-art robot policies such as Action Chunking Transformer (ACT) models are opaque, which may make it difficult for human partners to interpret or predict their actions and intent to facilitate task…
-

Causal-HRI: Causal Learning for Human-Robot Interaction
Abstract Real-world Human-Robot Interaction (HRI) requires robots to adeptly perceive and understand the dynamic human-centred environments in which they operate. Recent decades have seen remarkable advancements that have endowed robots with exceptional perception capabilities. The first workshop on “Causal-HRI: Causal Learning for Human-Robot Interaction” aims to bring together research perspectives from Causal Discovery and Inference and Causal Learning, in…