Research Area: Visualization
-
Designing Indicators to Show a Robot’s Physical Vision Capability
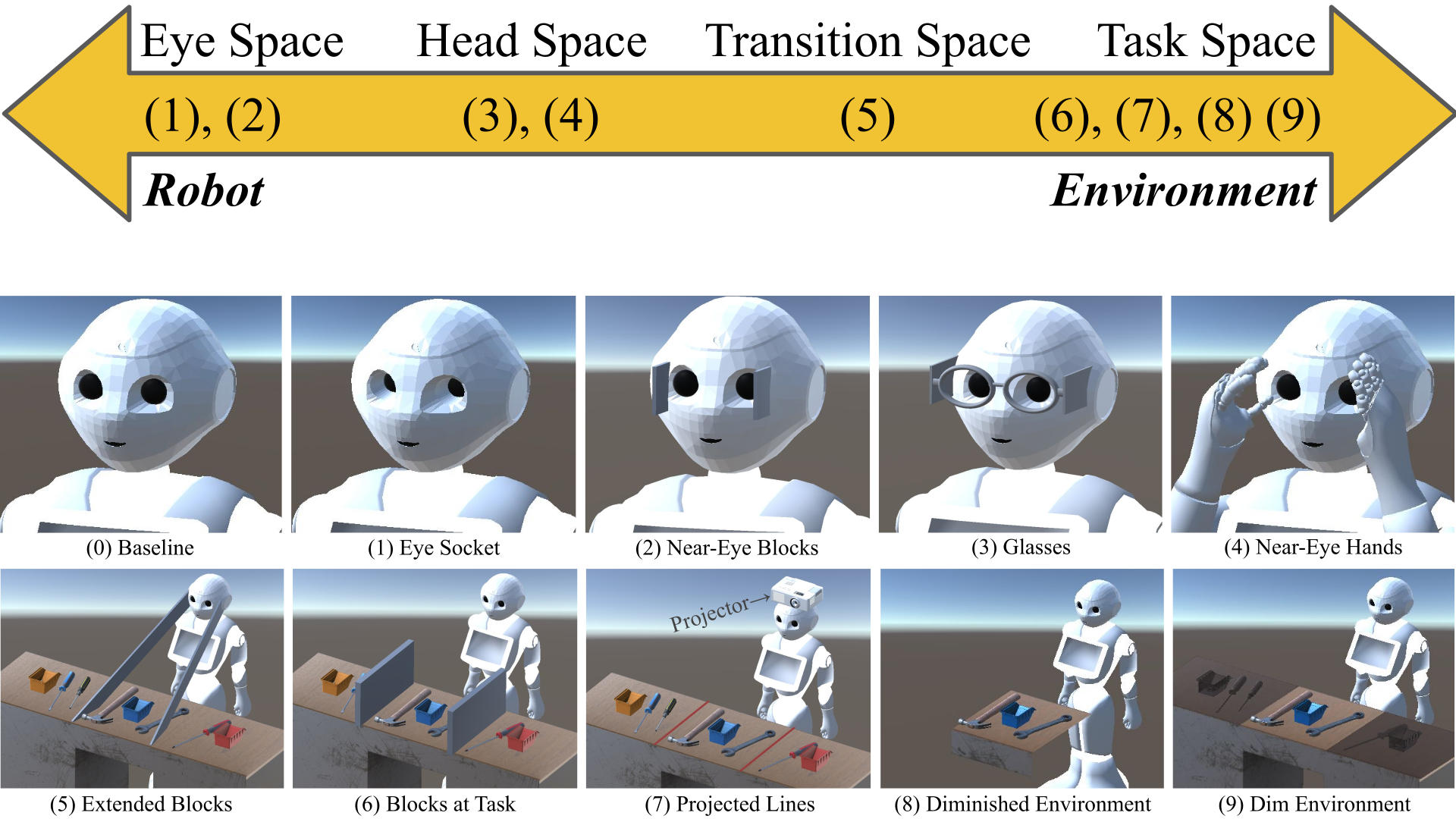
Abstract In human-robot interaction (HRI), studies show humans can mistakenly assume that robots and humans have the same field of view, possessing an inaccurate mental model of a robot. This misperception is problematic during collaborative HRI tasks where robots might be asked to complete impossible tasks about out-of-view objects. In this initial work, we aim…
-

Projecting Robot Navigation Paths: Hardware and Software for Projected AR
-

Projection Mapping Implementation: Enabling Direct Externalization of Perception Results and Action Intent to Improve Robot Explainability
-
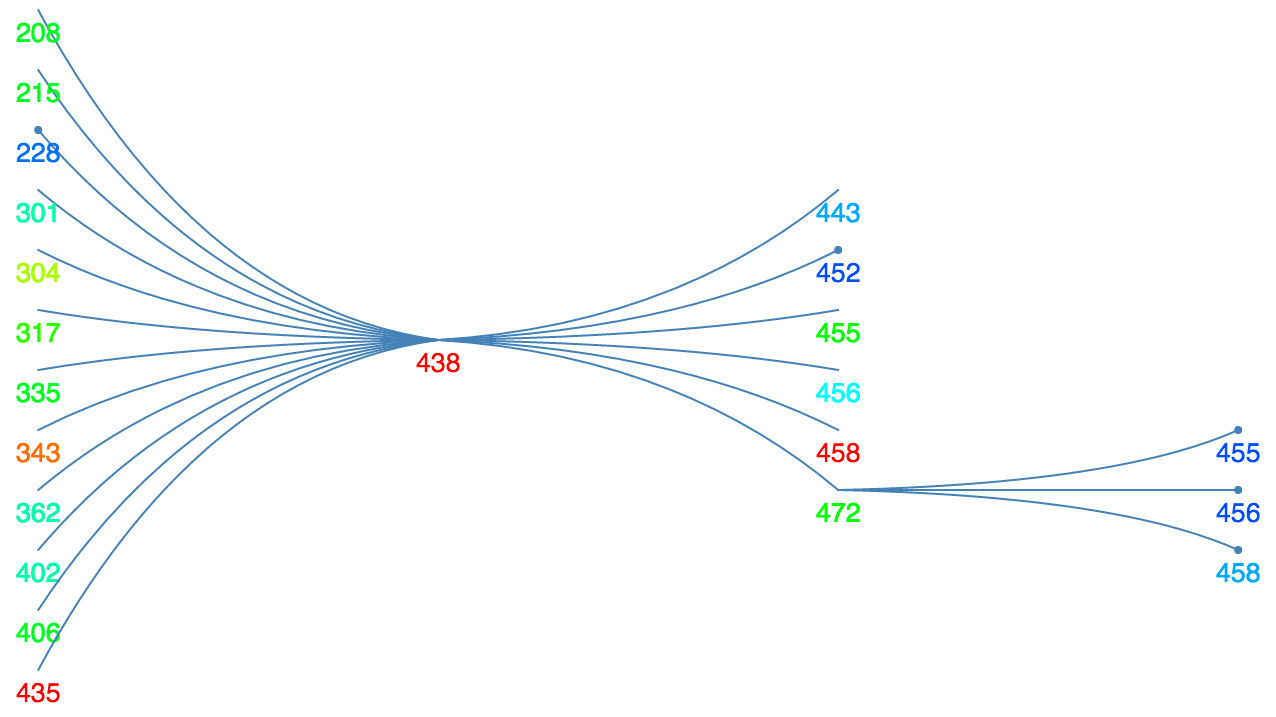
Delivering Scalable Frequent Pattern Mining for Non-Expert Data Miners
-
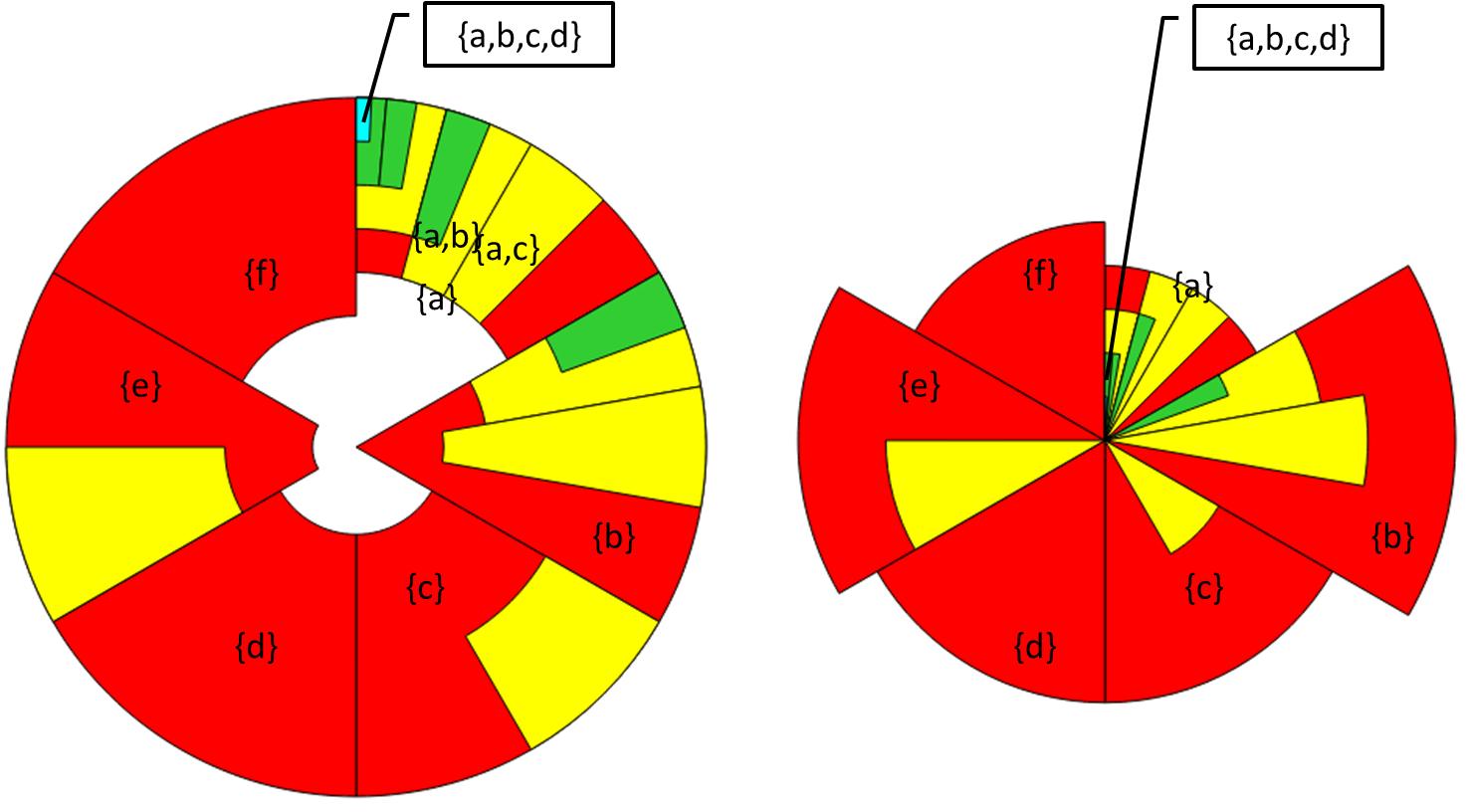
An Interactive Circular Visual Analytic Tool for Visualization of Web Data