Research Area: Robot Failures
-
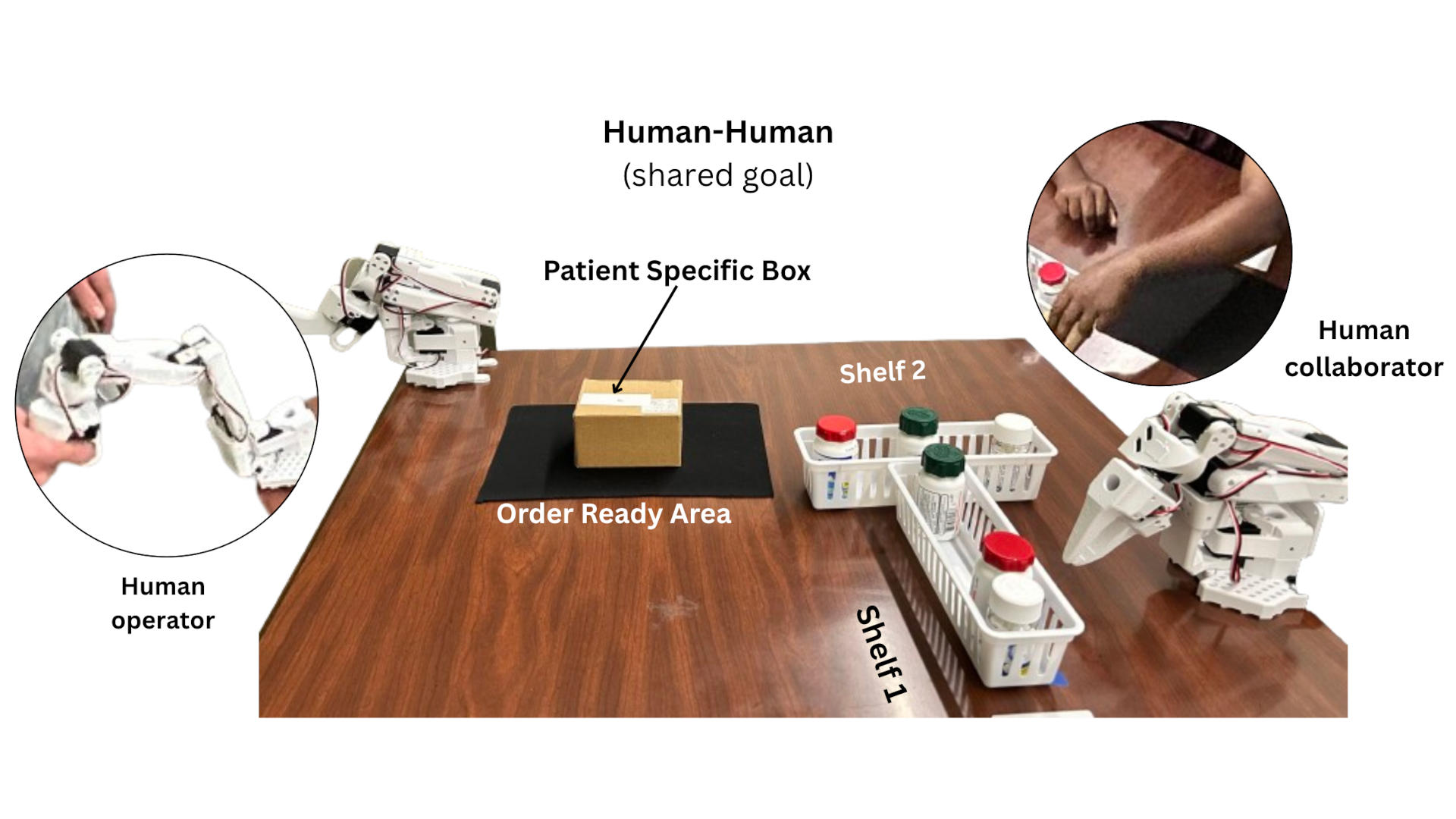
Towards Embodied Agent Intent Explanation in Human-Robot Collaboration: ACT Error Analysis and Solution Conceptualization
Abstract Collaborative robots must not only perform competently but also communicate their intents transparently to ensure safety and efficiency in shared task environments. However, state-of-the-art robot policies such as Action Chunking Transformer (ACT) models are opaque, which may make it difficult for human partners to interpret or predict their actions and intent to facilitate task…
-
Reactive or Proactive? How Robots Should Explain Failures
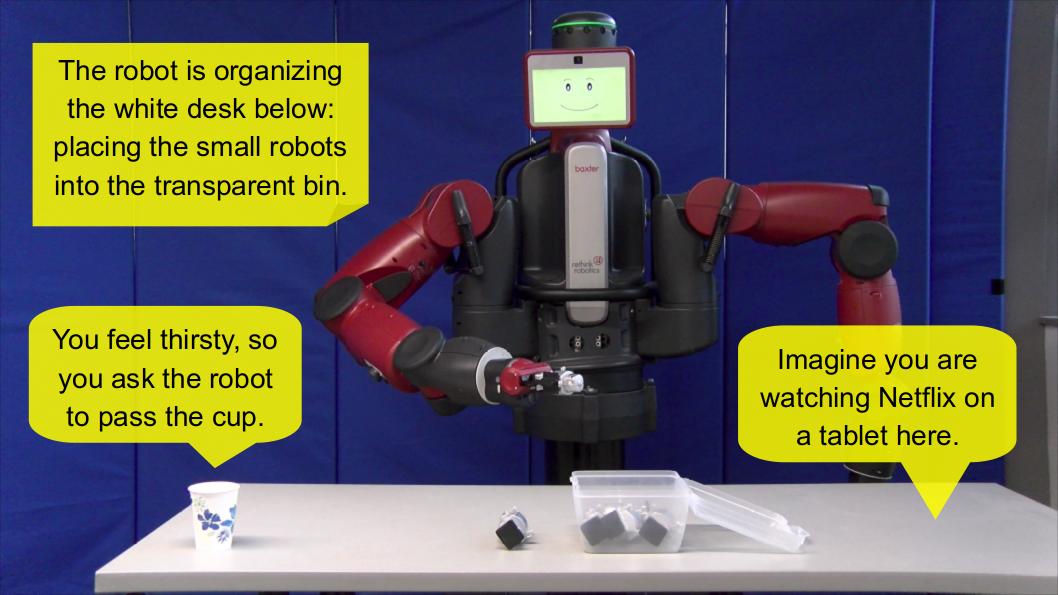
Abstract As robots tackle increasingly complex tasks, the need for explanations becomes essential for gaining trust and acceptance. Explainable robotic systems should not only elucidate failures when they occur but also predict and preemptively explain potential issues. This paper compares explanations from Reactive Systems, which detect and explain failures after they occur, to Proactive Systems,…
-
Communicating Missing Causal Information to Explain a Robot’s Past Behavior
-
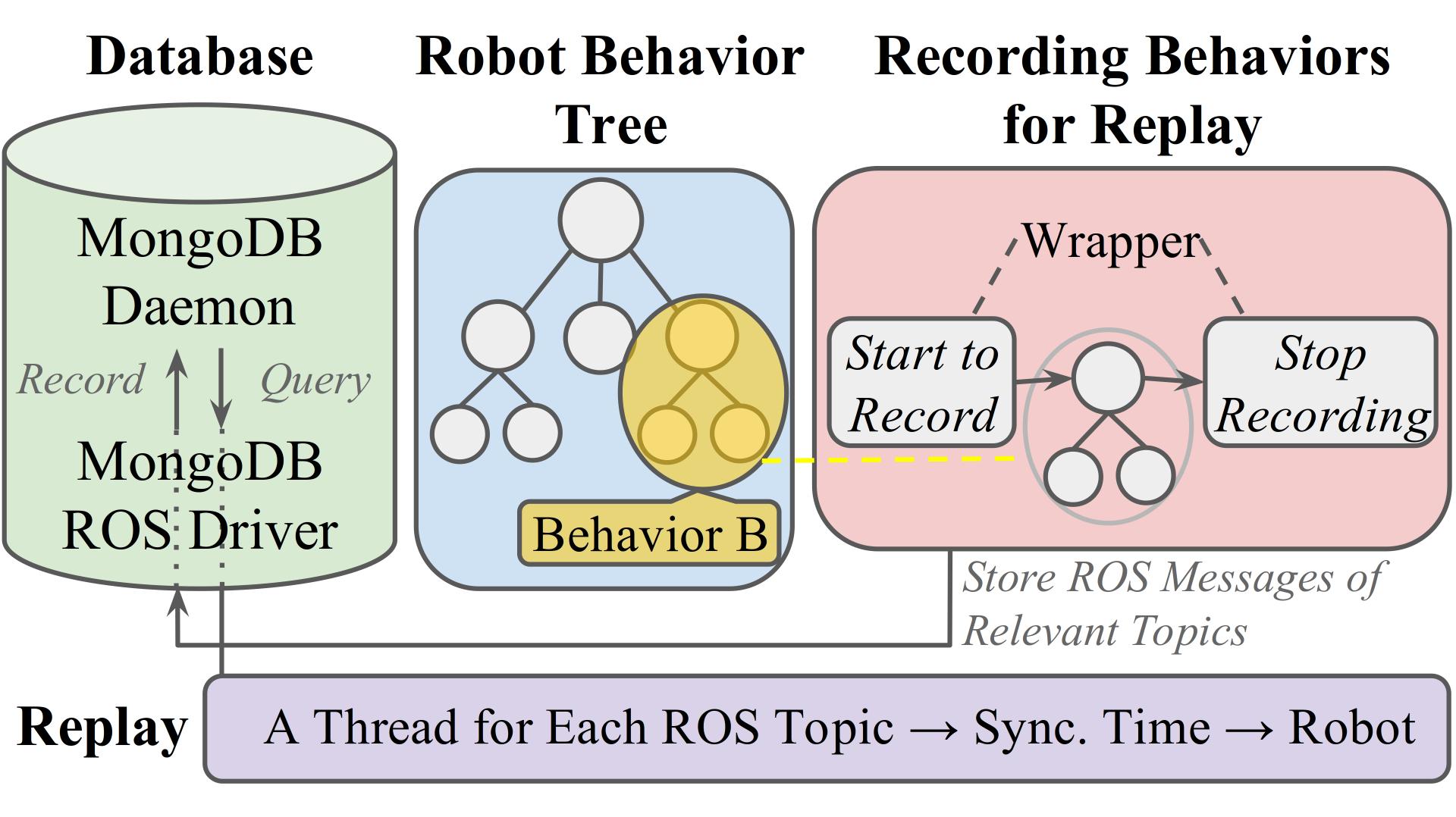
Mixed-Reality Robot Behavior Replay: A System Implementation
-
“Why Didn’t I Do It?” A Study Design to Evaluate Robot Explanations
-
The Need for Verbal Robot Explanations and How People Would Like a Robot To Explain Itself
-
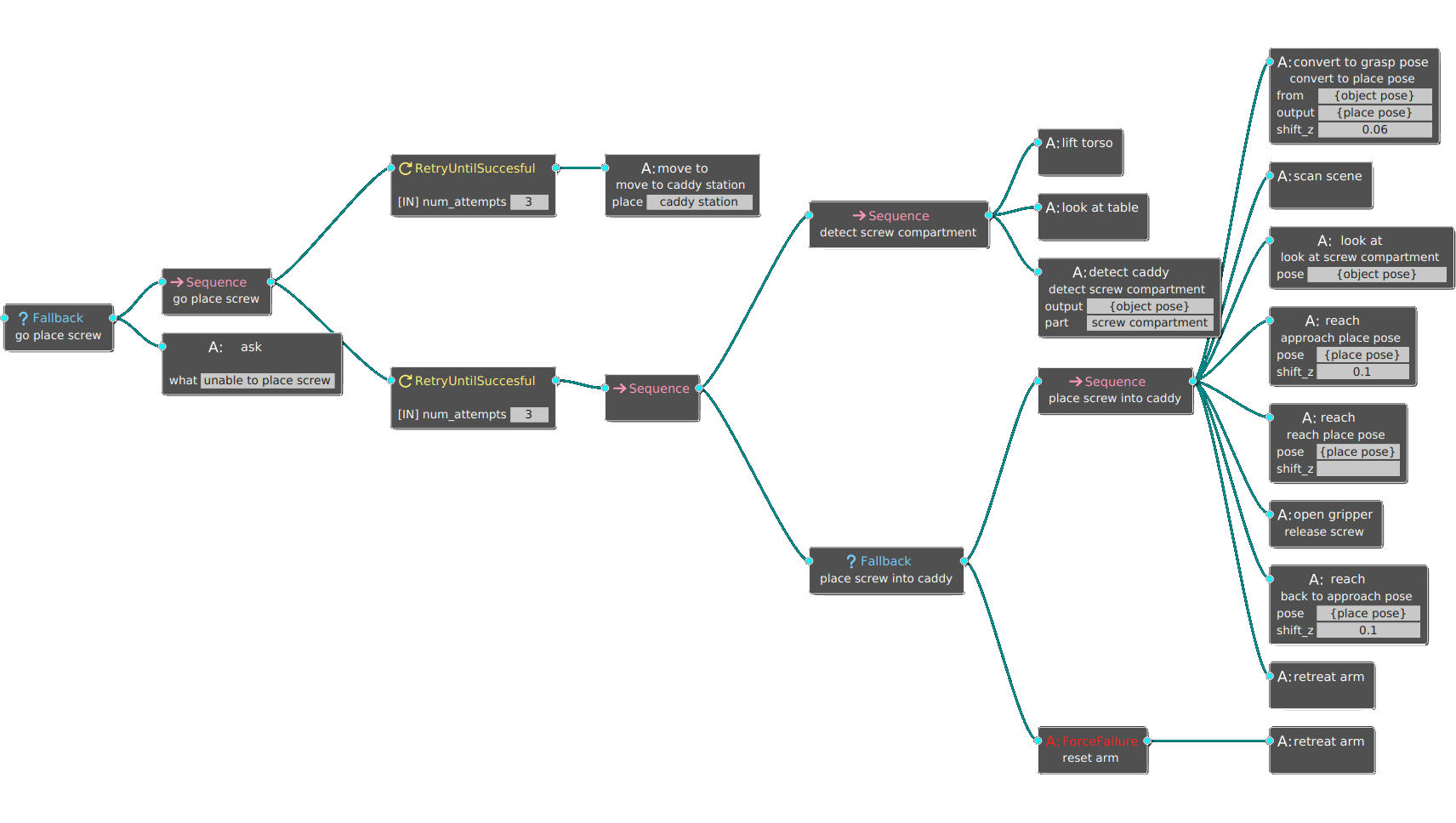
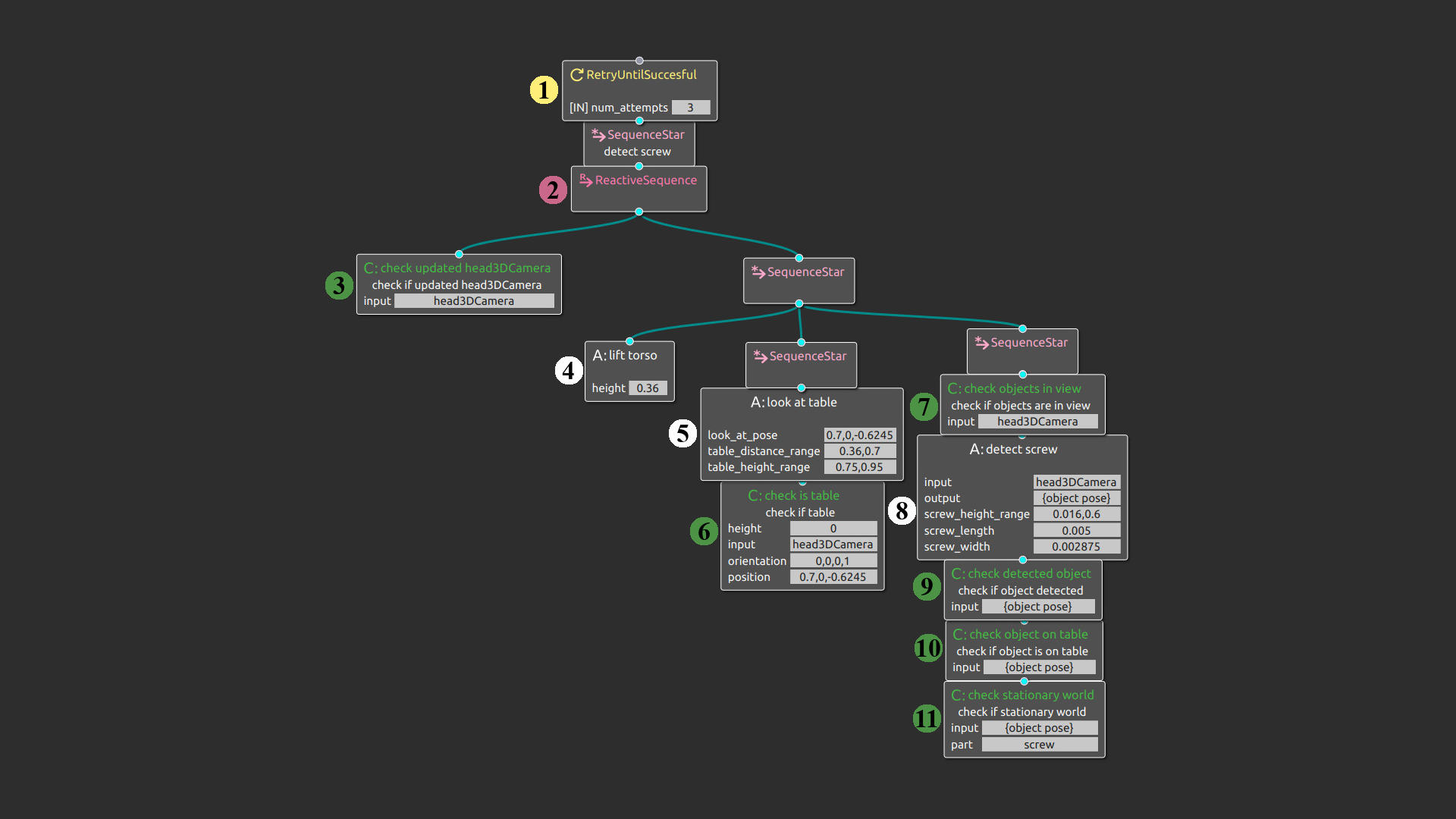
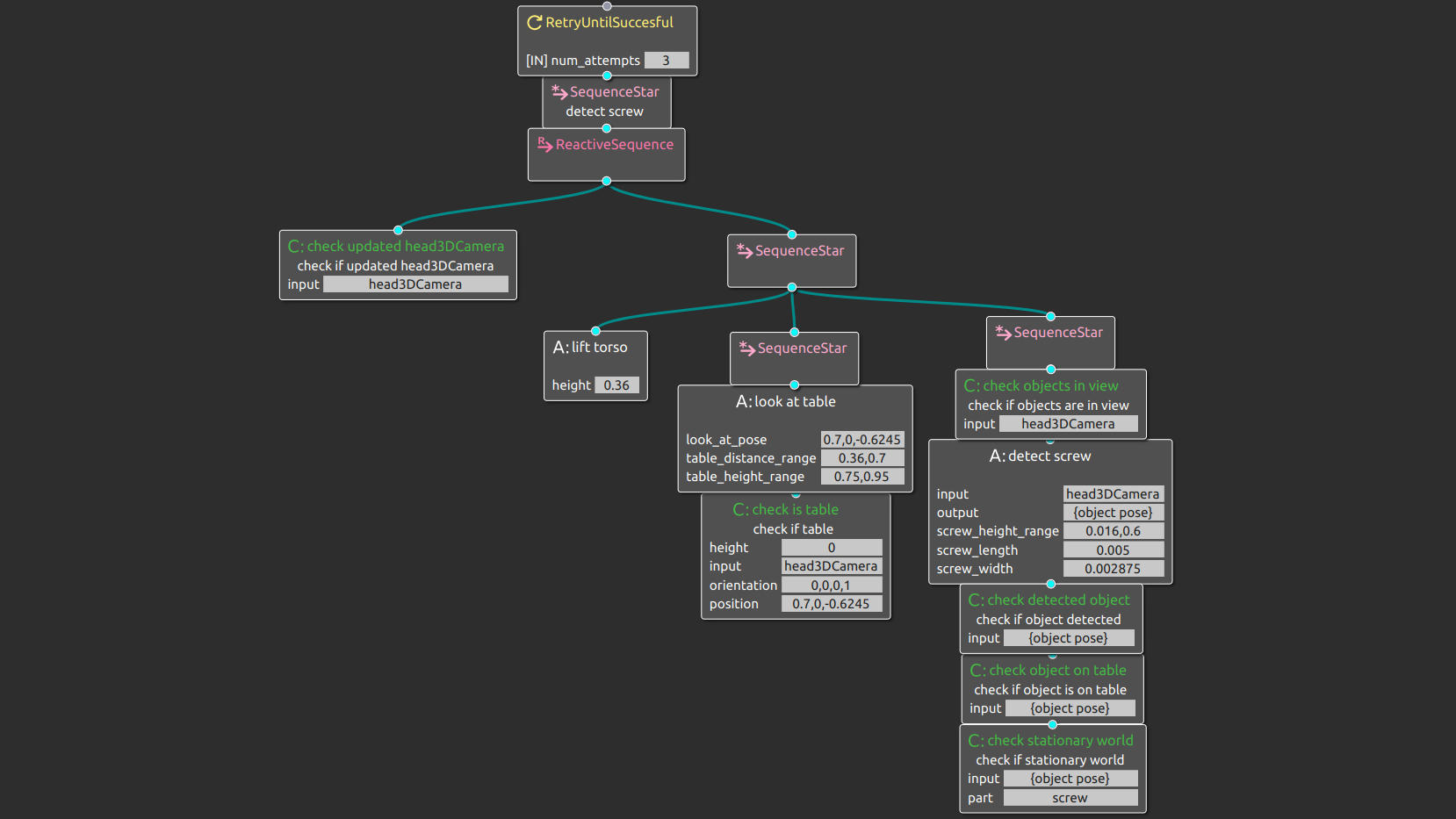
Building The Foundation of Robot Explanation Generation Using Behavior Trees
-
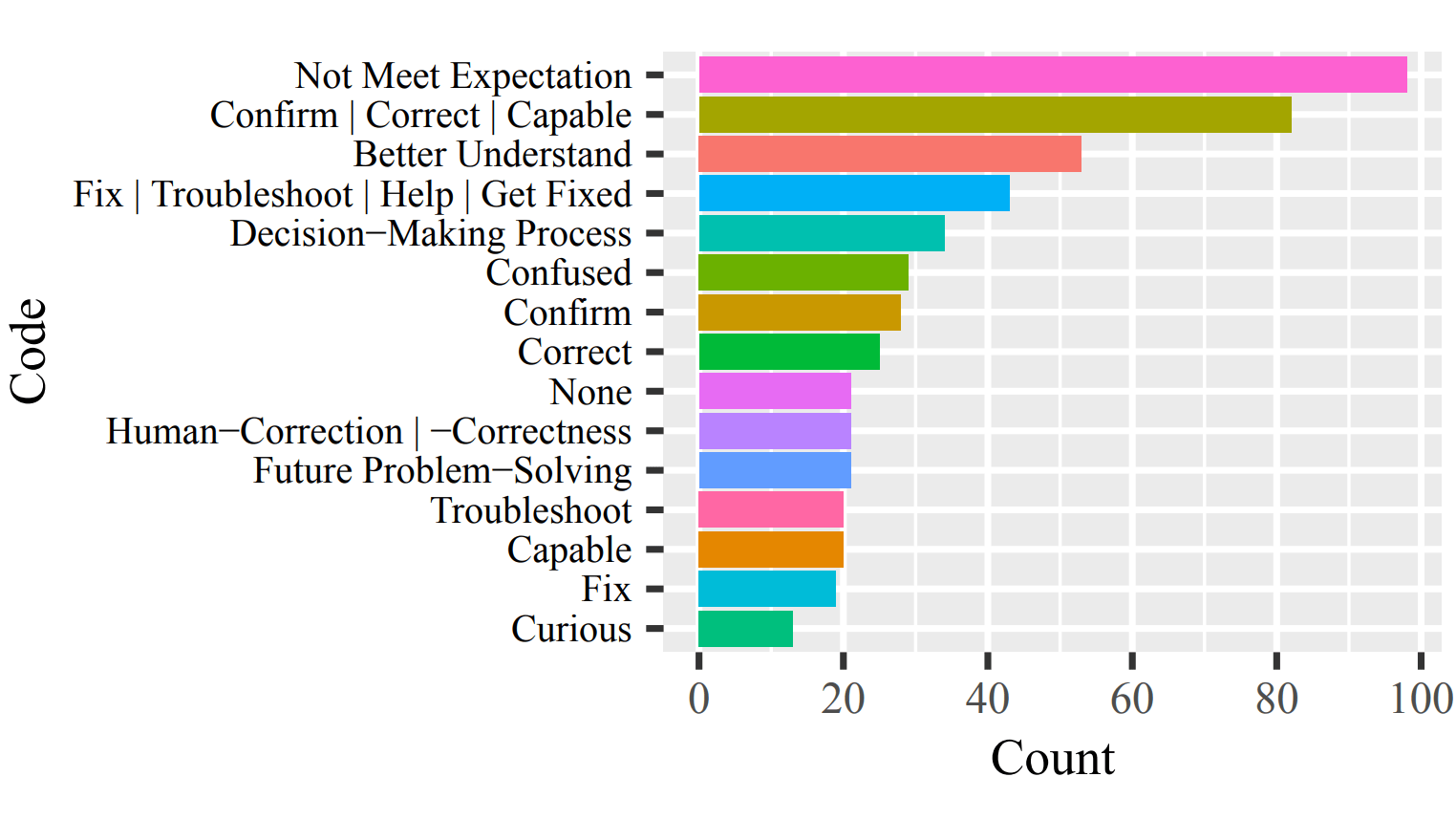
Reasons People Want Explanations After Unrecoverable Pre-Handover Failures