Research Area: Robot Explanation
-
Exploring Familiar Design Strategies to Explain Robot Vision Capabilities
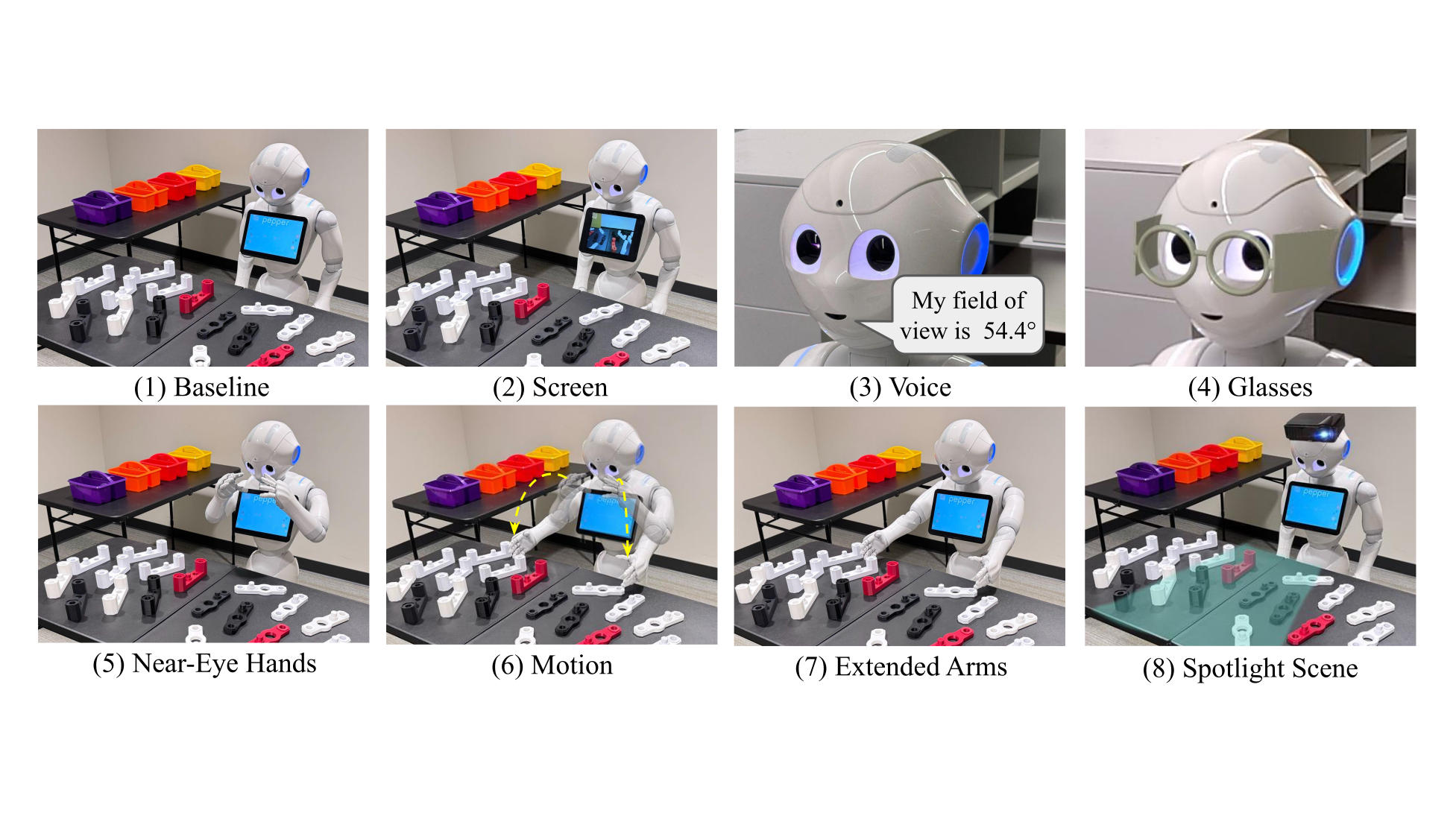
Abstract Humans often assume that robots share the same field of view (FoV) as themselves, given their human-like appearance. In reality, robots have a much narrower FoV (e.g., Pepper robot’s 54.4∘ and Fetch robot’s 54∘) than humans’ 180∘, leading to misaligned mental models and reduced efficiency in collaborative tasks. For instance, a user might place…
-

Anywhere Projected AR for Robot Communication: A Mid-Air Fog Screen-Robot System
Abstract Augmented reality (AR) allows visualizations to be situated where they are relevant, e.g., in a robot’s operating environment or task space. Yet, headset-based AR suffers a scalability issue because every viewer must wear a headset. Projector-based spatial AR solves this problem by projecting augmentations onto the scene, e.g., recognized objects or navigation paths, viewable…
-
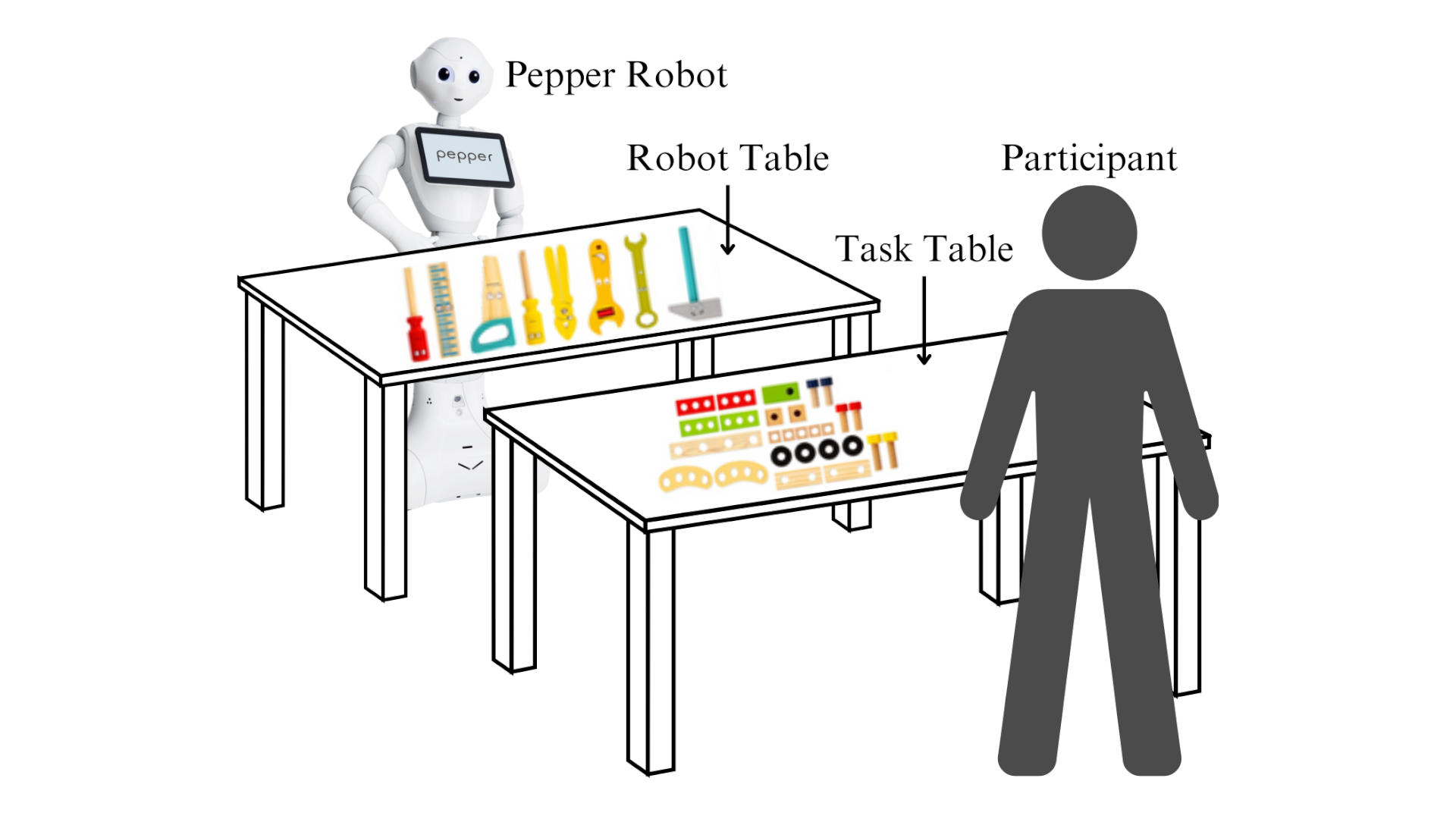
To Understand Indicators of Robots’ Vision Capabilities
Abstract Study [10] indicates that humans can mistakenly assume that robots and humans have the same field of view (FoV), possessing an inaccurate mental model of a robot. This misperception is problematic during collaborative HRI tasks where robots might be asked to complete impossible tasks about out-of-view objects. To help align humans’ mental models of…
-
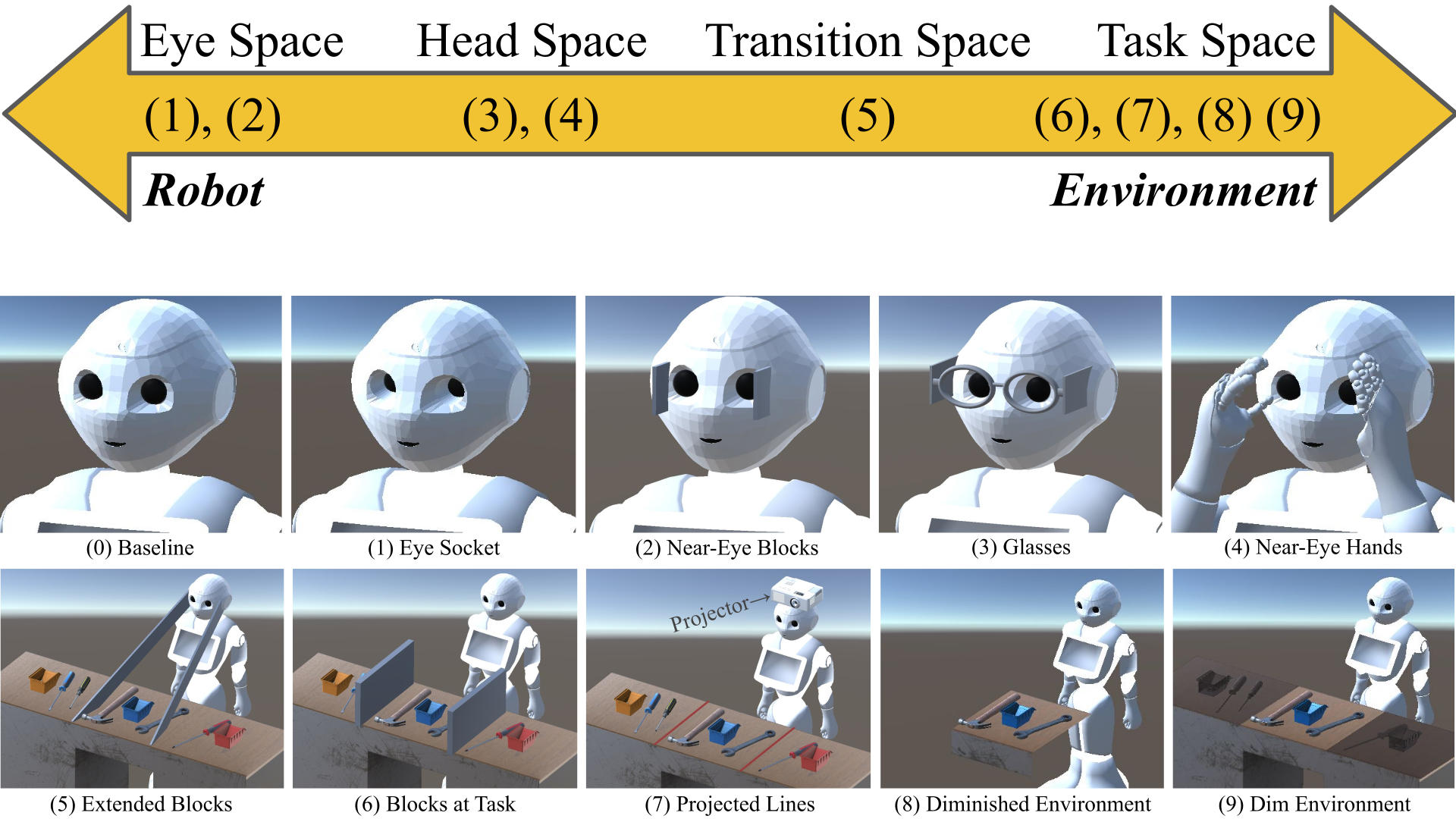
Designing Indicators to Show a Robot’s Physical Vision Capability
Abstract In human-robot interaction (HRI), studies show humans can mistakenly assume that robots and humans have the same field of view, possessing an inaccurate mental model of a robot. This misperception is problematic during collaborative HRI tasks where robots might be asked to complete impossible tasks about out-of-view objects. In this initial work, we aim…
-

Causal-HRI: Causal Learning for Human-Robot Interaction
Abstract Real-world Human-Robot Interaction (HRI) requires robots to adeptly perceive and understand the dynamic human-centred environments in which they operate. Recent decades have seen remarkable advancements that have endowed robots with exceptional perception capabilities. The first workshop on “Causal-HRI: Causal Learning for Human-Robot Interaction” aims to bring together research perspectives from Causal Discovery and Inference and Causal Learning, in…
-
Reactive or Proactive? How Robots Should Explain Failures
Abstract As robots tackle increasingly complex tasks, the need for explanations becomes essential for gaining trust and acceptance. Explainable robotic systems should not only elucidate failures when they occur but also predict and preemptively explain potential issues. This paper compares explanations from Reactive Systems, which detect and explain failures after they occur, to Proactive Systems,…
-
Communicating Missing Causal Information to Explain a Robot’s Past Behavior
-
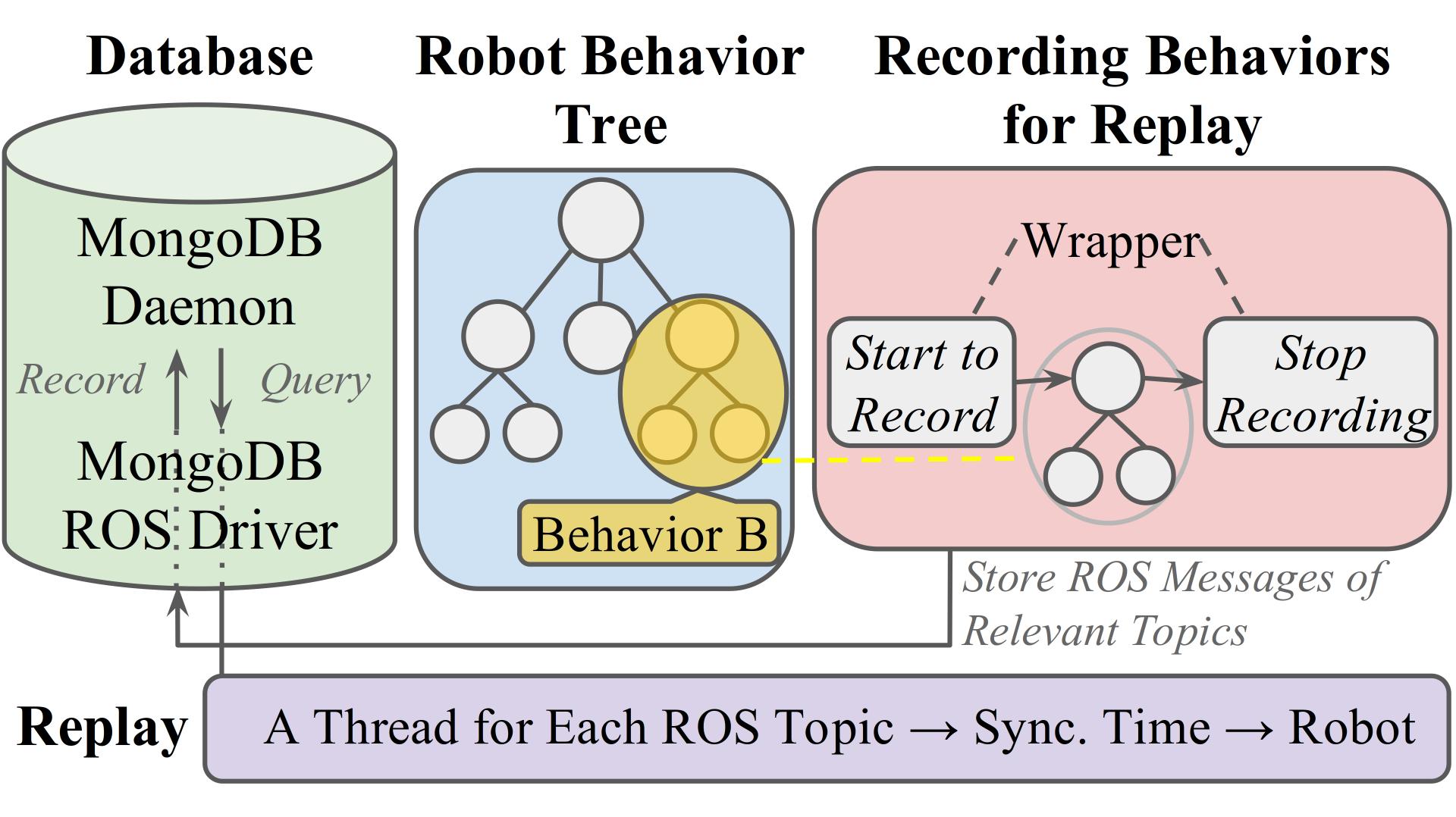
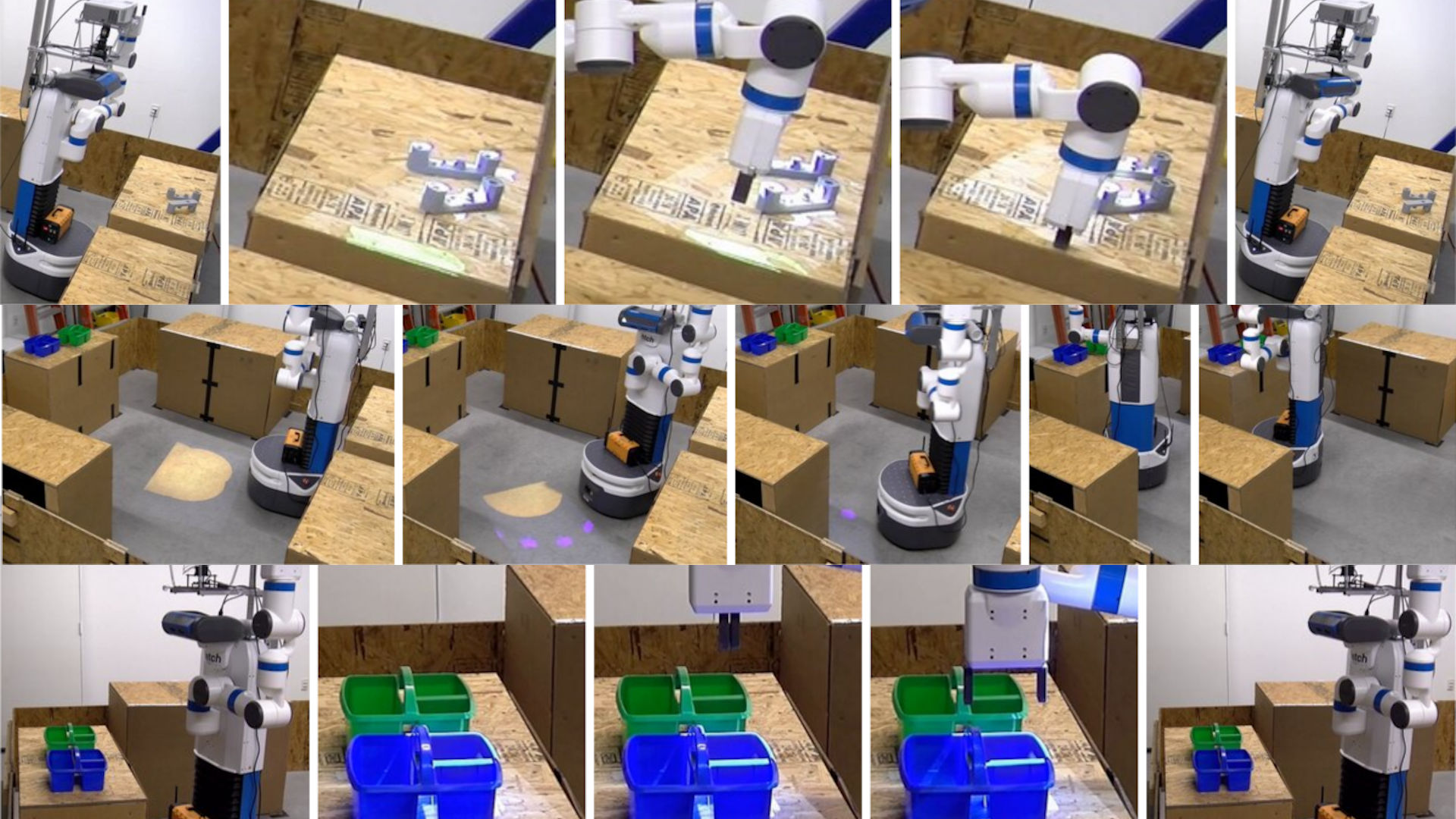
Mixed-Reality Robot Behavior Replay: A System Implementation
-
“Why Didn’t I Do It?” A Study Design to Evaluate Robot Explanations
-
Causal Robot Communication Inspired by Observational Learning Insights
-
Teacher, Teammate, Subordinate, Friend: Generating Norm Violation Responses Grounded in Role-based Relational Norms
-

Robot Explanations: Preferences, Generation, and Communication
-
The Need for Verbal Robot Explanations and How People Would Like a Robot To Explain Itself
-
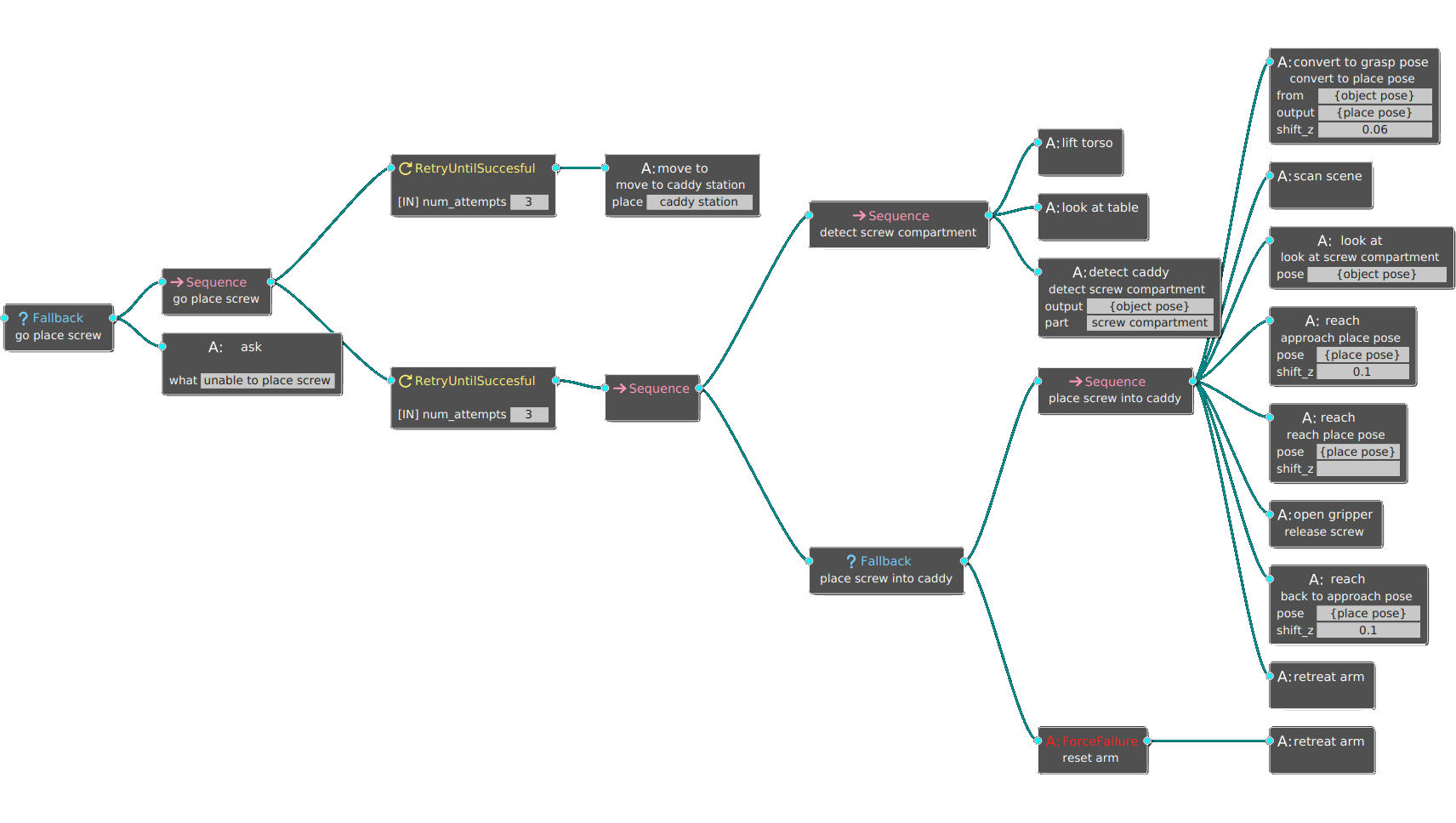
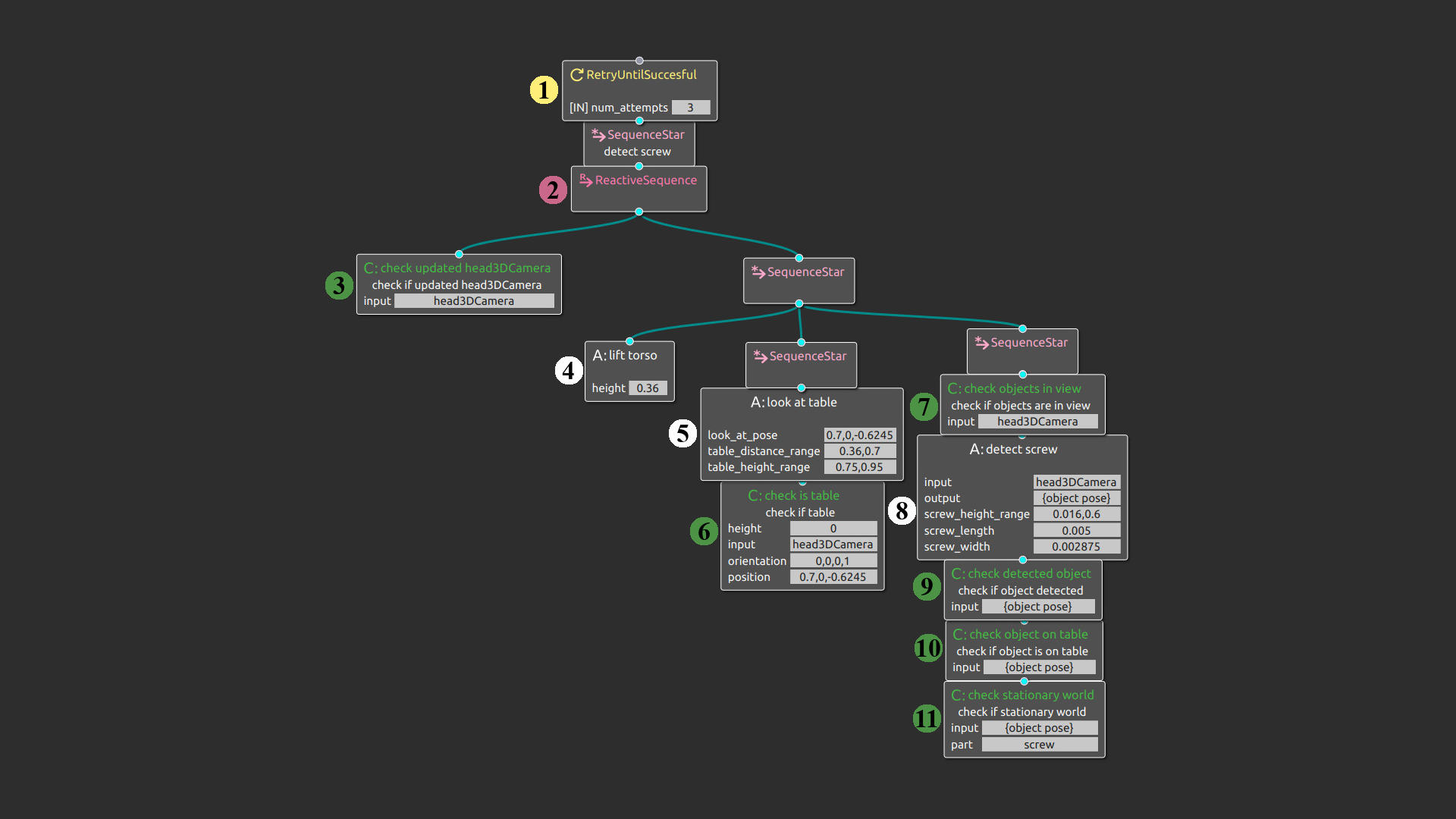
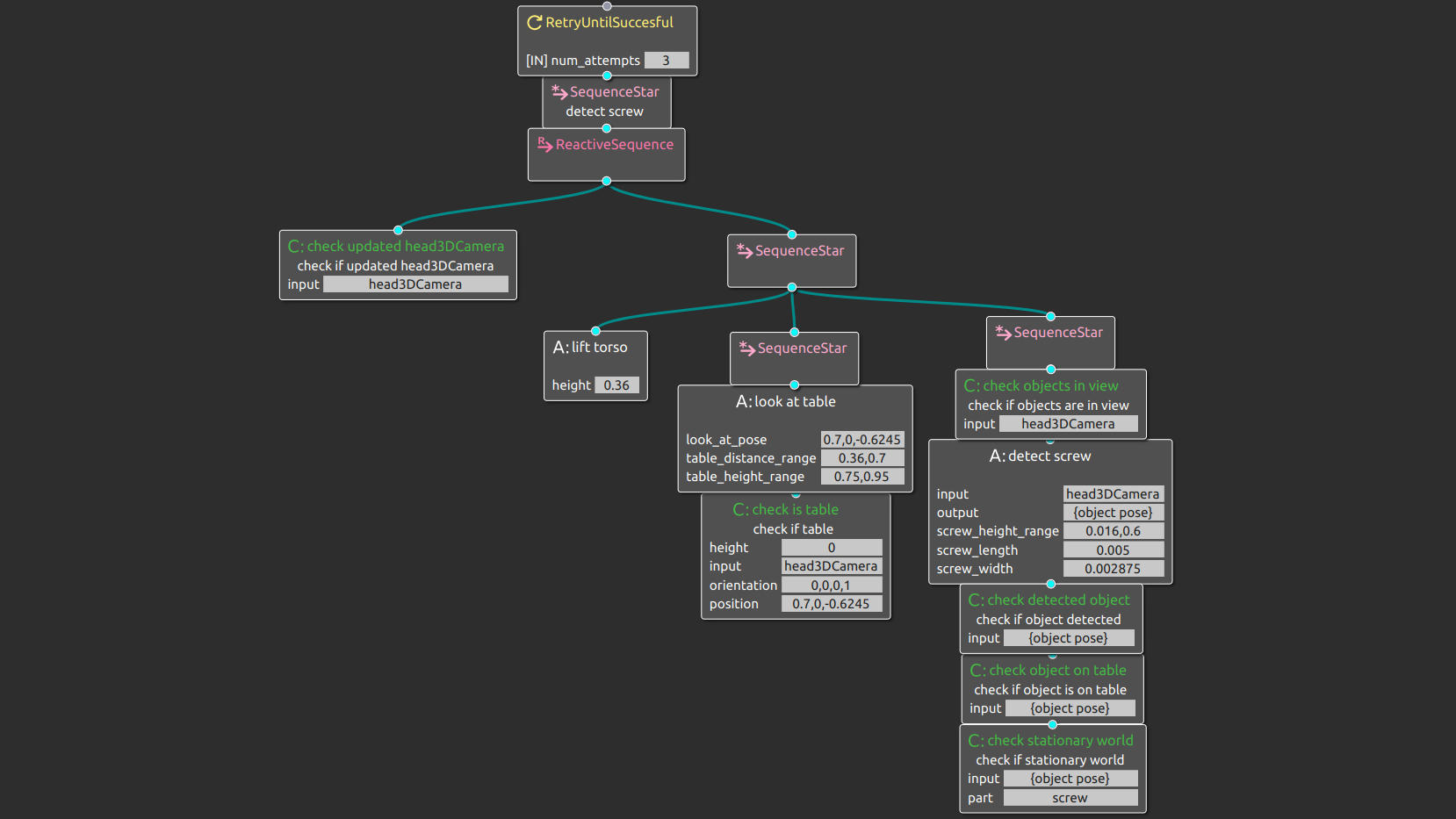
Building The Foundation of Robot Explanation Generation Using Behavior Trees
-
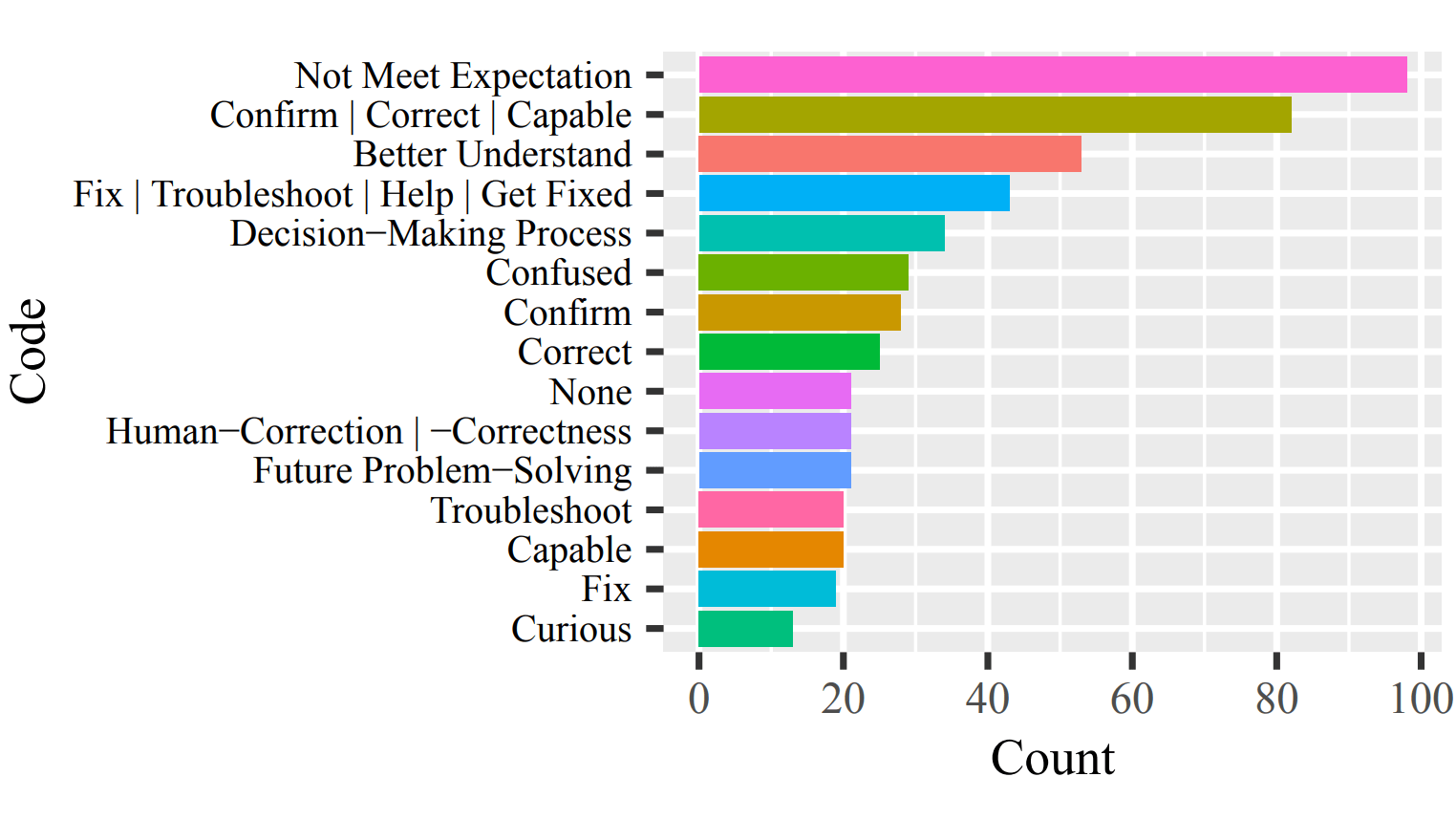
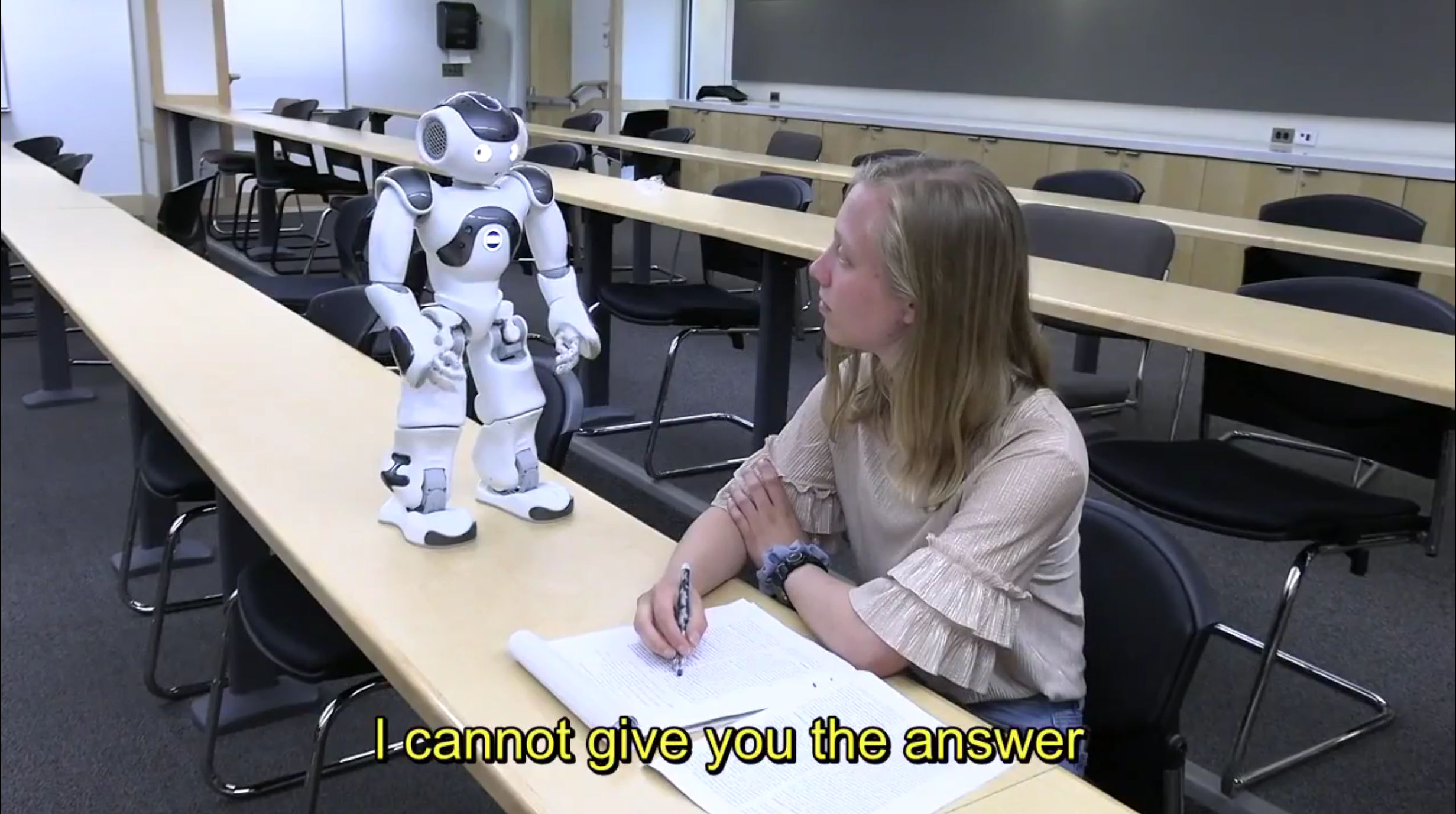
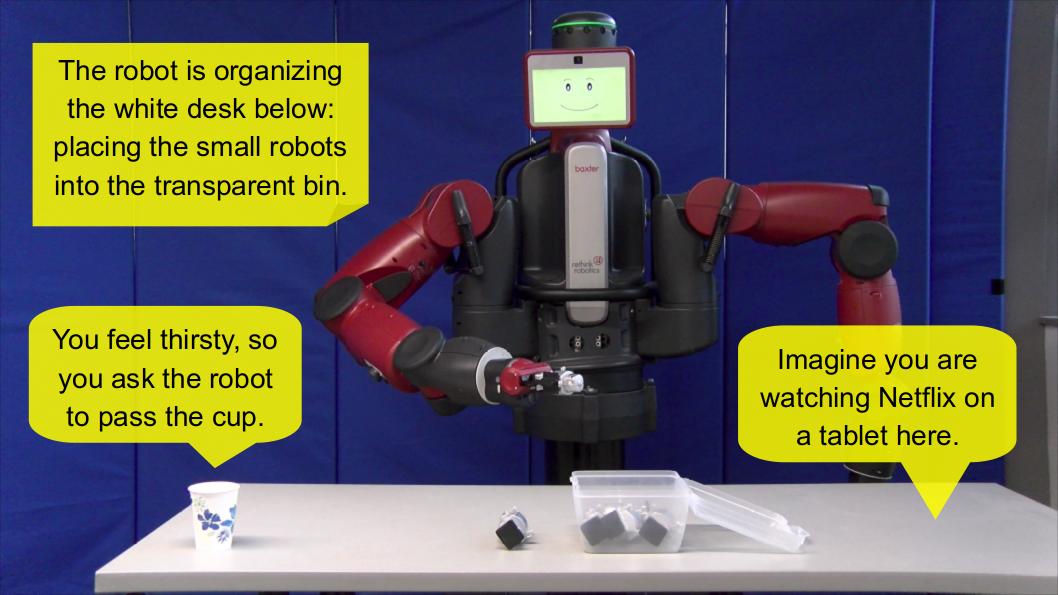
Reasons People Want Explanations After Unrecoverable Pre-Handover Failures
-
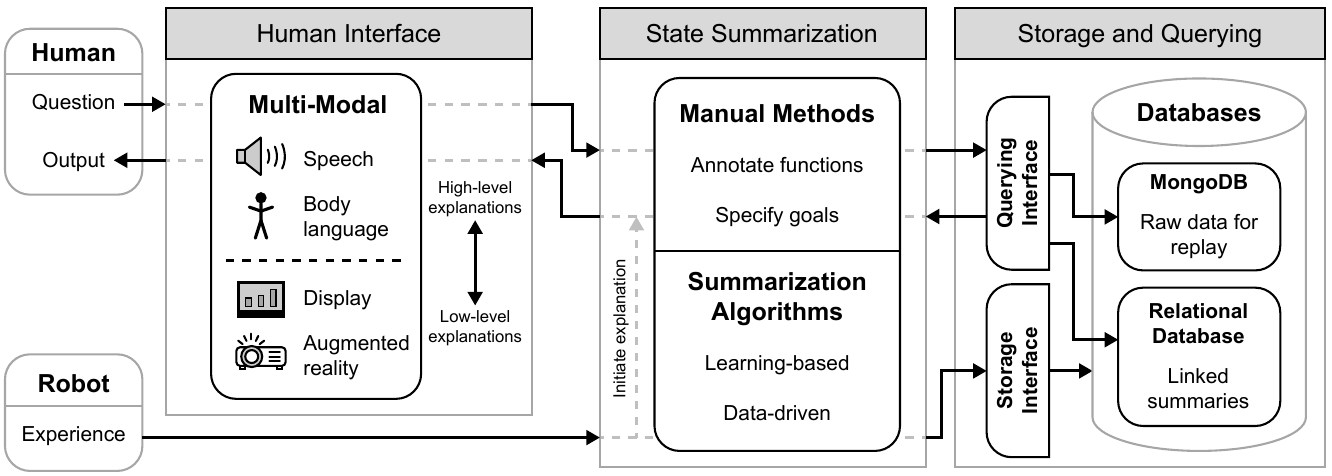
Towards A Robot Explanation System: A Survey and Our Approach to State Summarization, Storage and Querying, and Human Interface