Research Area: References
-

Givenness Hierarchy Theoretic Sequencing of Robot Task Instructions
Abstract Introduction: When collaborative robots teach human teammates new tasks, they must carefully determine the order to explain different parts of the task. In robotics, this problem is especially challenging, due to the situated and dynamic nature of robot task instruction. Method: In this work, we consider how robots can leverage the Givenness Hierarchy to…
-
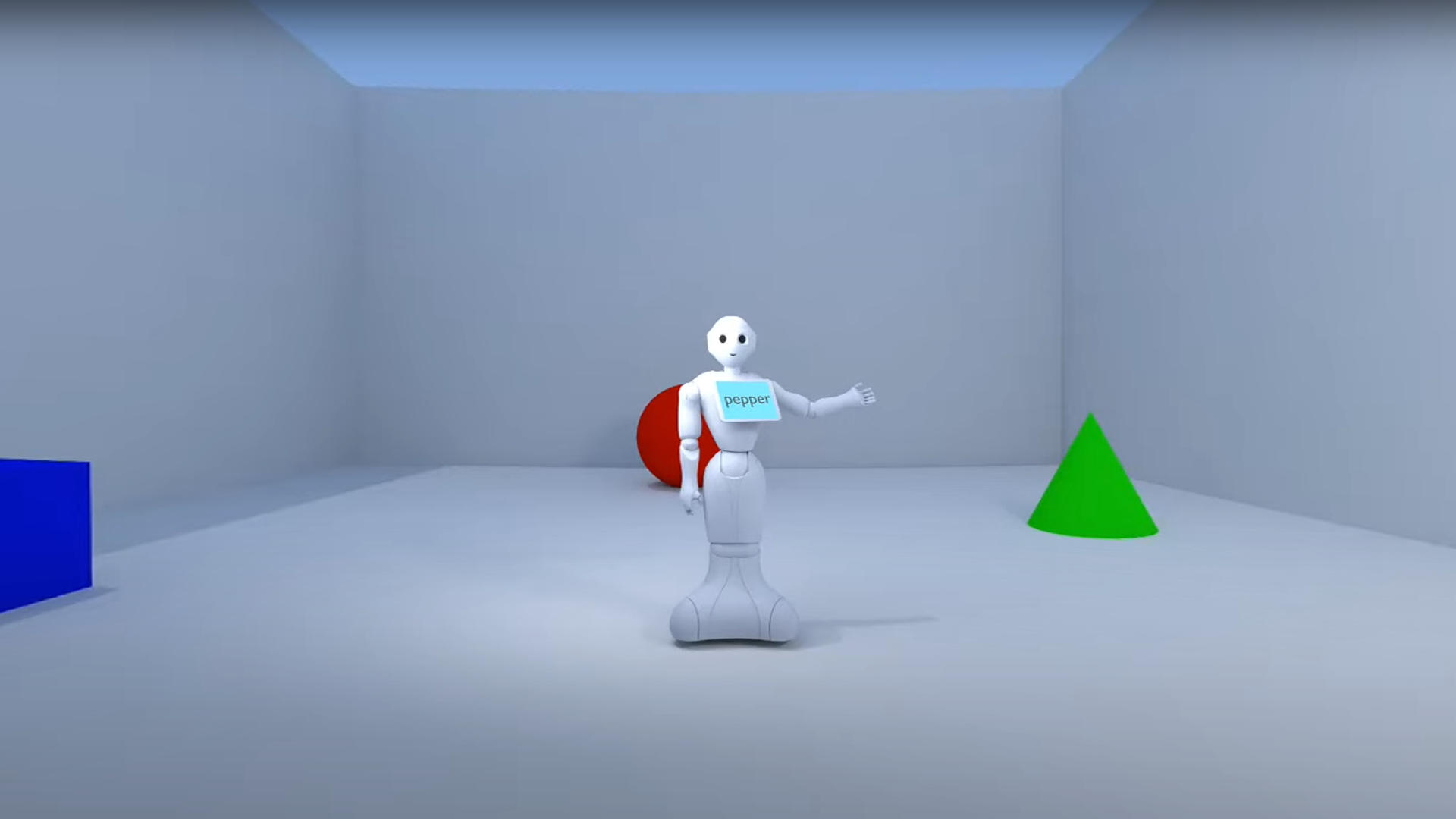
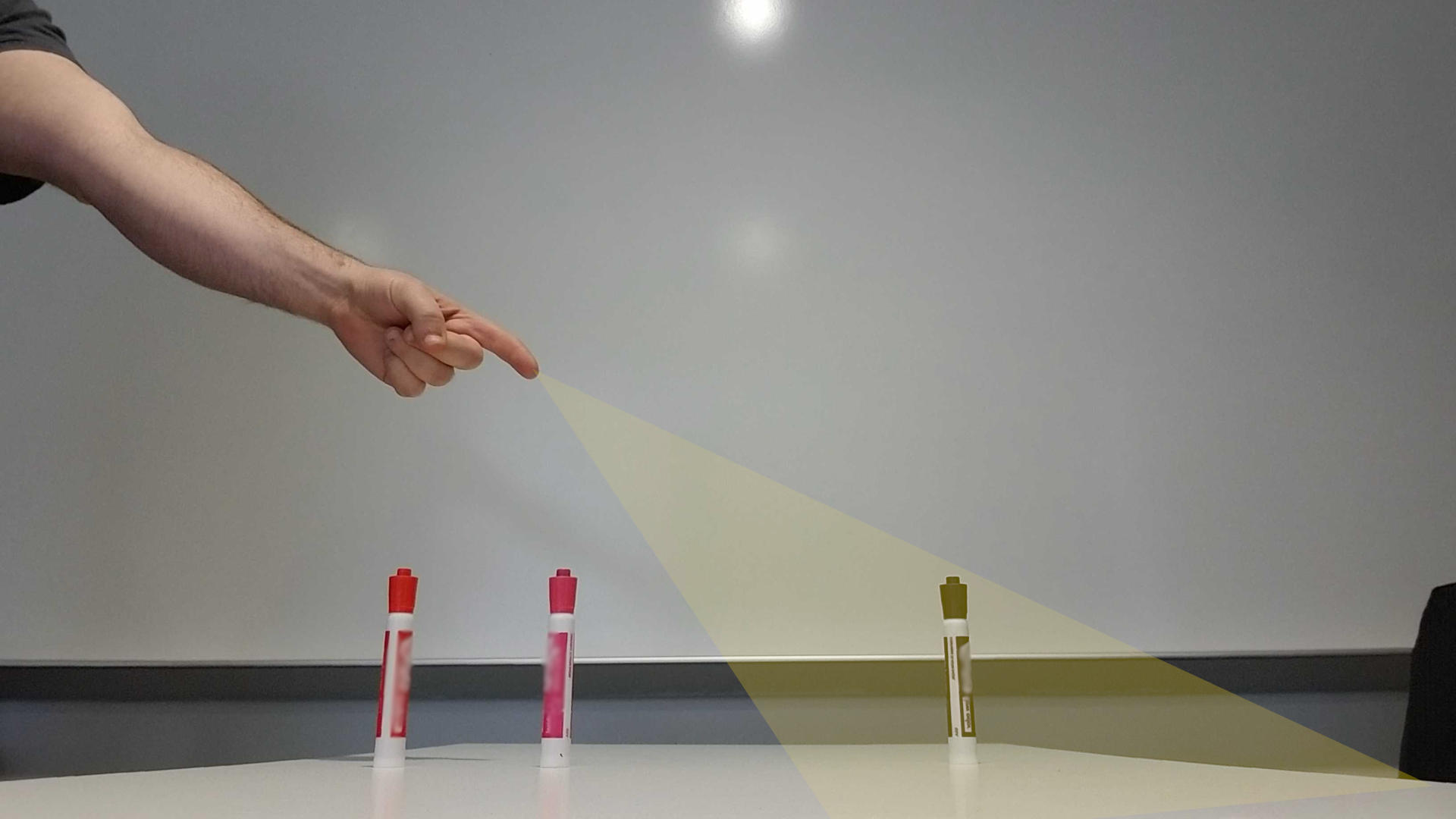
(Gestures Vaguely): The Effects of Robots’ Use of Abstract Pointing Gestures in Large-Scale Environments
Abstract As robots are deployed into large-scale human environments, they will need to engage in task-oriented dialogues about objects and locations beyond those that can currently be seen. In these contexts, speakers use a wide range of referring gestures beyond those used in the small-scale interaction contexts that HRI research typically investigates. In this work,…
-
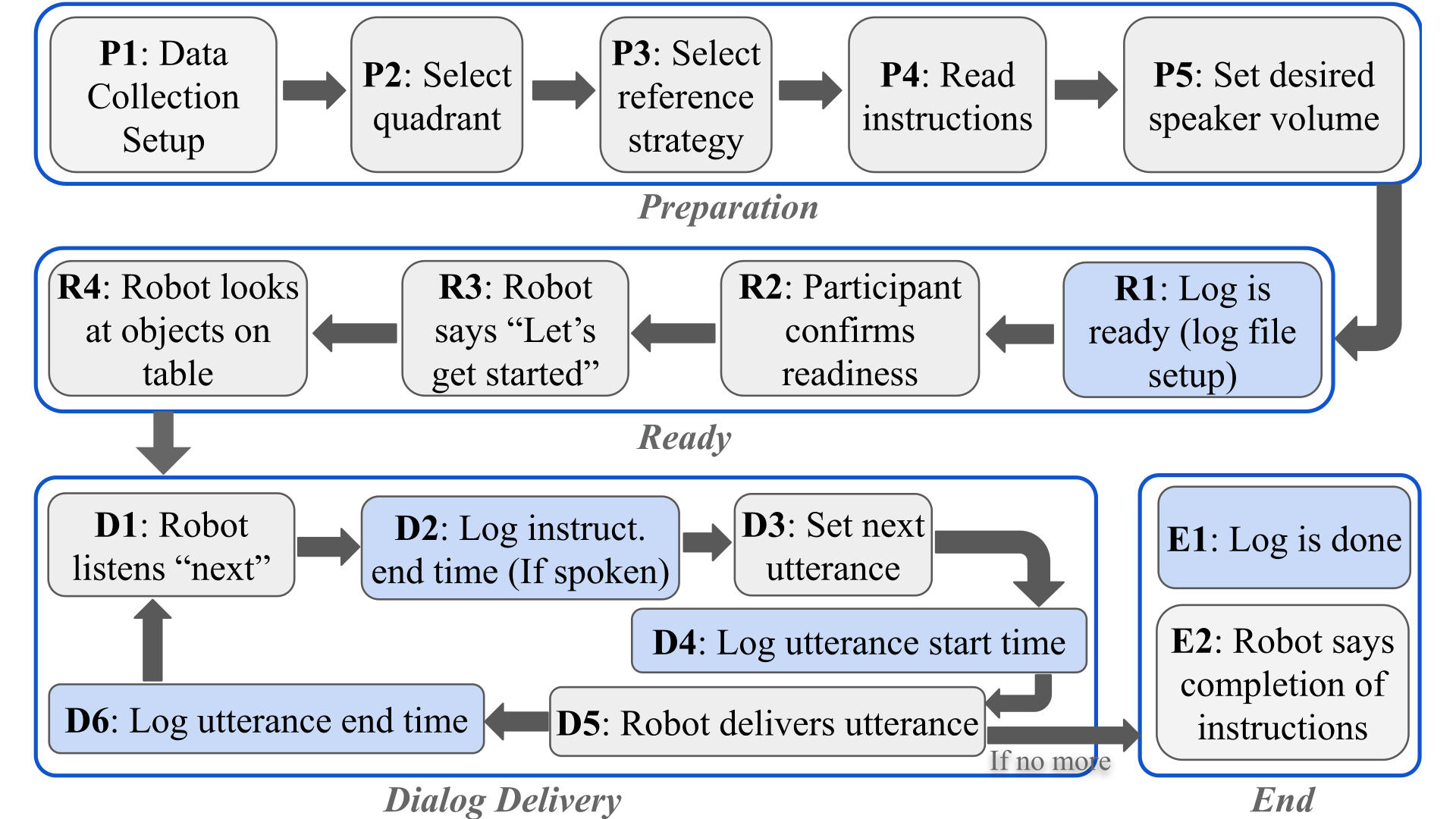
Towards Reproducible Language-Based HRI Experiments: Open-Sourcing a Generalized Experiment Project
Abstract We are witnessing increasing calls for reproducibility and replicability in HRI studies to improve reliability and confidence in empirical findings. One solution to facilitate this is using a robot platform that researchers frequently use, making it easier to replicate studies to verify results. In this work, we focus on a popular, affordable, and rich-in-functionality…
-

The Importance of Memory for Language-Capable Robots
-
Toward Open-World Human-Robot Interaction: What Types of Gestures Are Used in Task-Based Open-World Referential Communication?
-

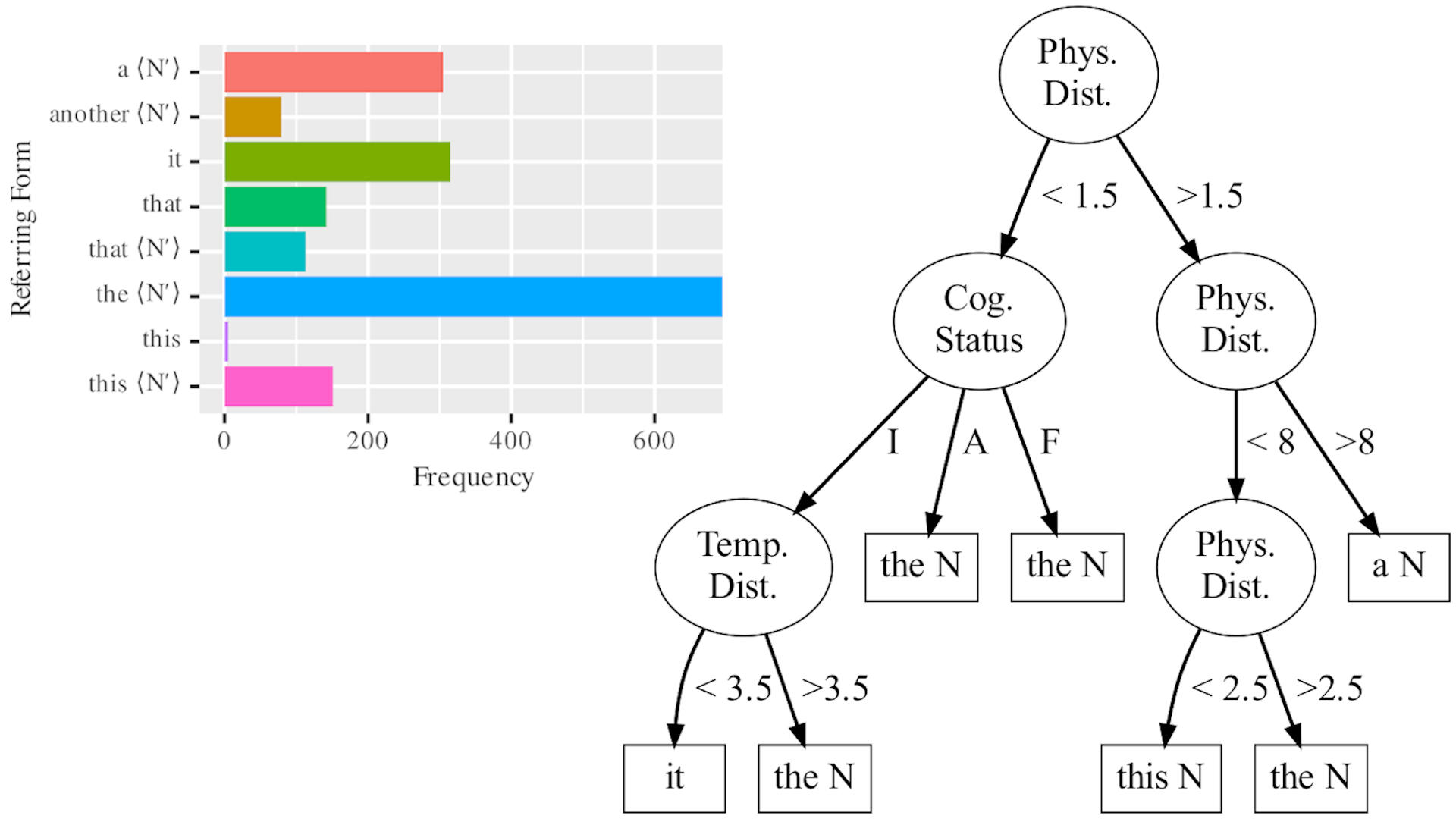
Exploring the Naturalness of Cognitive Status Informed Referring Form Selection Models
-
Evaluating Cognitive Status-Informed Referring Form Selection for Human-Robot Interactions
-

Best of Both Worlds? Combining Different Forms of Mixed Reality Deictic Gestures
-
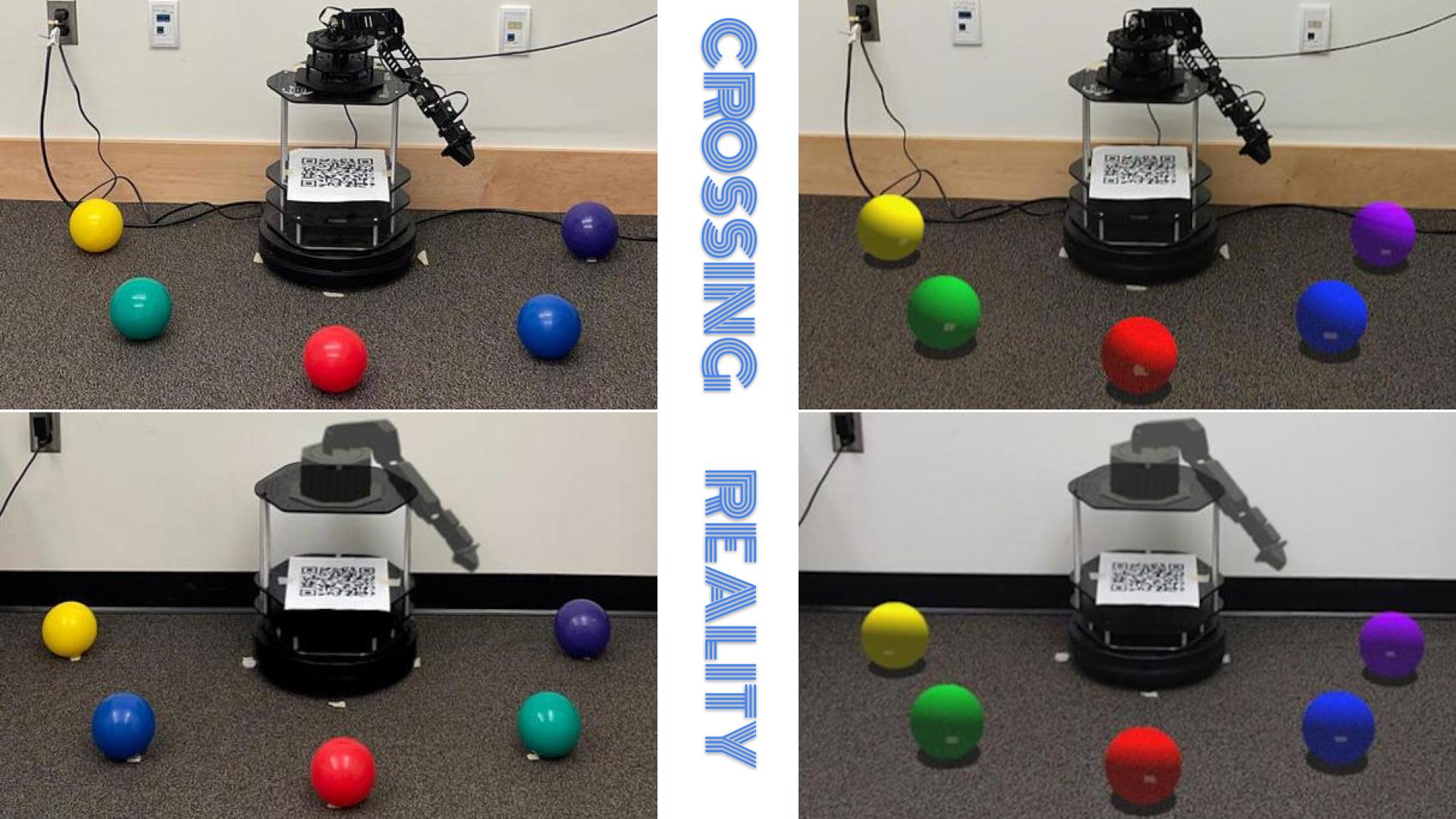
Crossing Reality: Comparing Physical and Virtual Robot Deixis
-
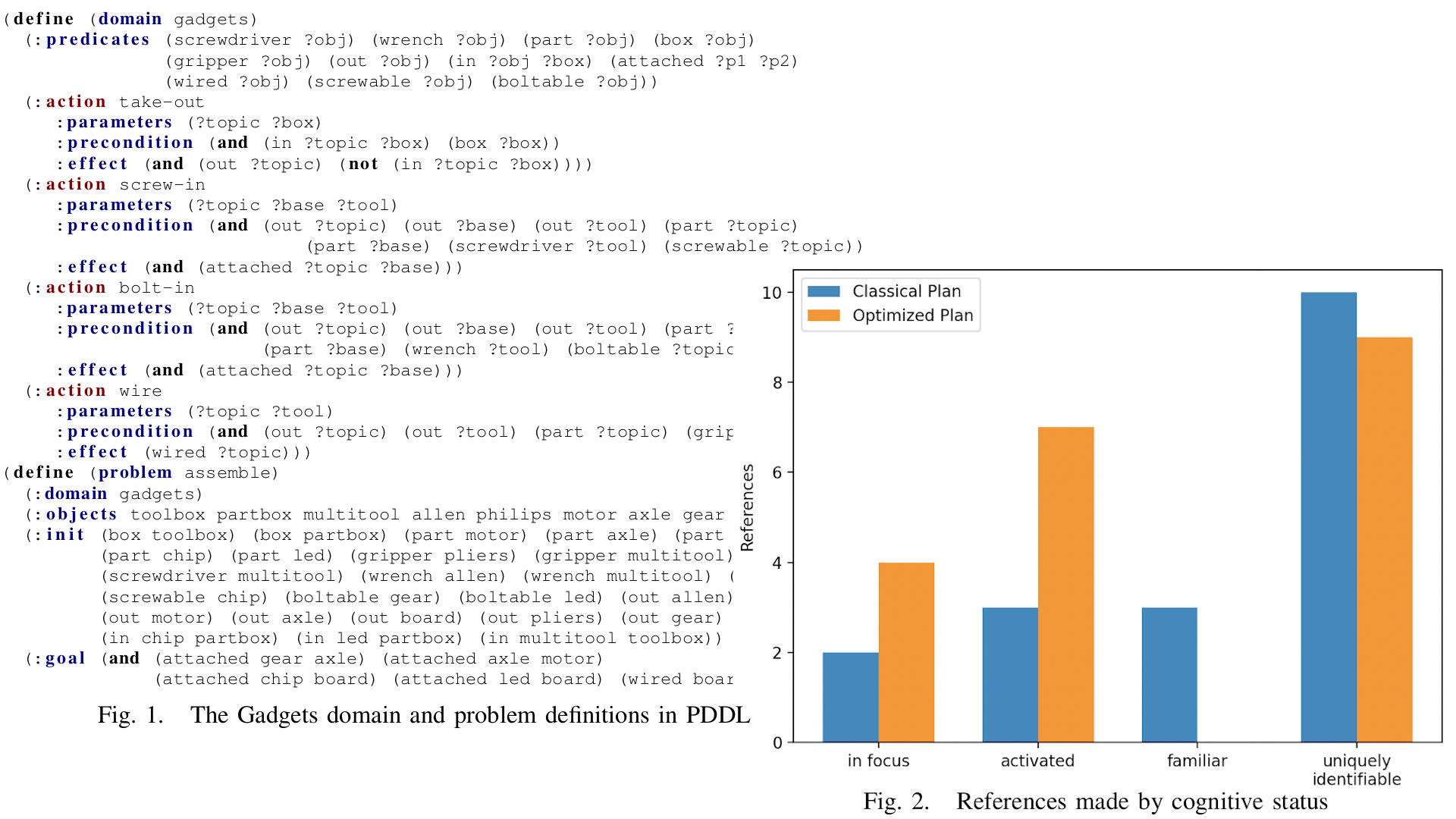
Givenness Hierarchy Informed Optimal Document Planning for Situated Human-Robot Interaction
-
Evaluating Referring Form Selection Models in Partially-Known Environments
-

Towards an Understanding of Physical vs Virtual Robot Appendage Design
-
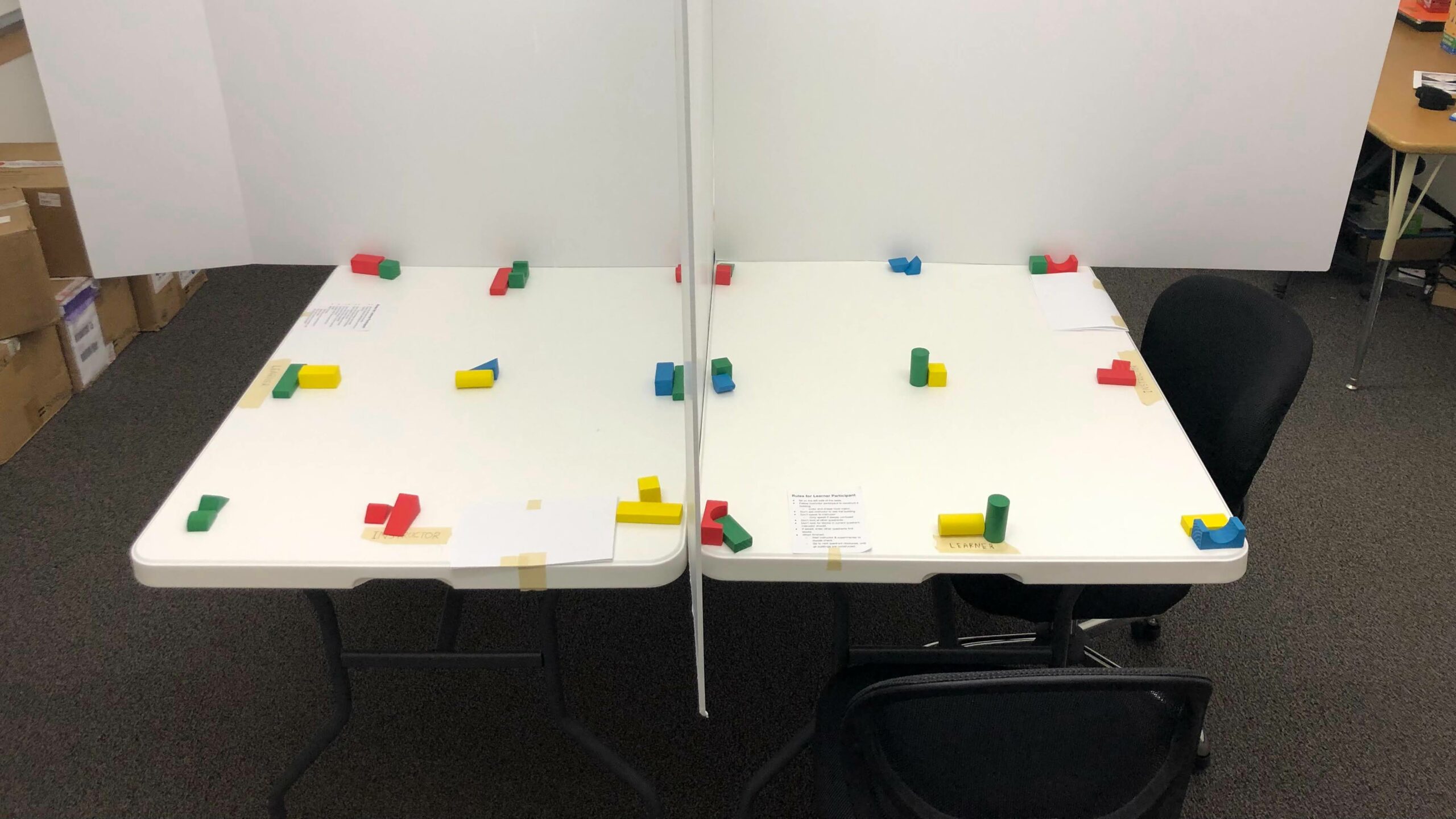
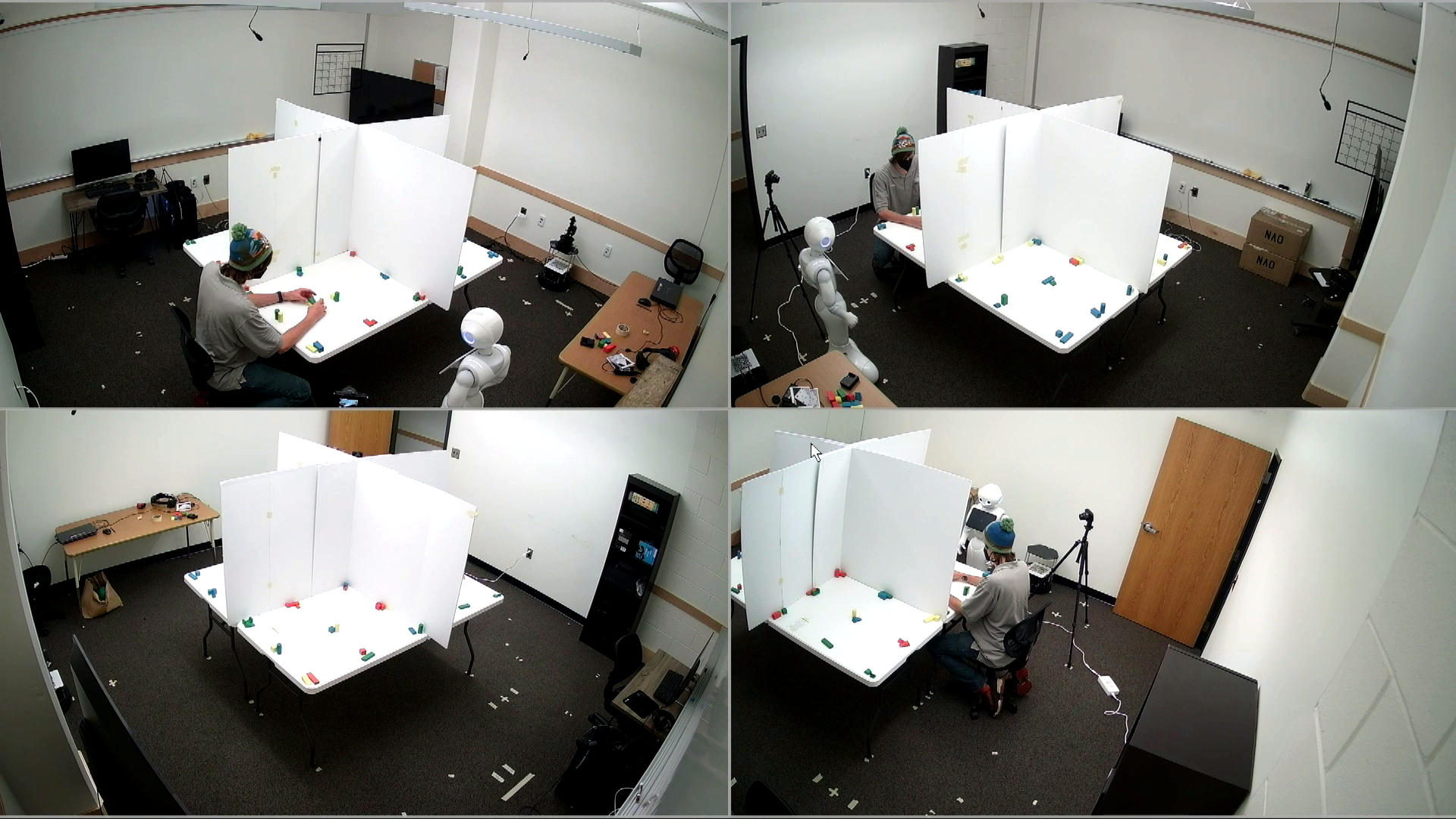
A Task Design for Studying Referring Behaviors for Linguistic HRI