Research Area: Mobile Manipulation
-

Anywhere Projected AR for Robot Communication: A Mid-Air Fog Screen-Robot System
Abstract Augmented reality (AR) allows visualizations to be situated where they are relevant, e.g., in a robot’s operating environment or task space. Yet, headset-based AR suffers a scalability issue because every viewer must wear a headset. Projector-based spatial AR solves this problem by projecting augmentations onto the scene, e.g., recognized objects or navigation paths, viewable…
-
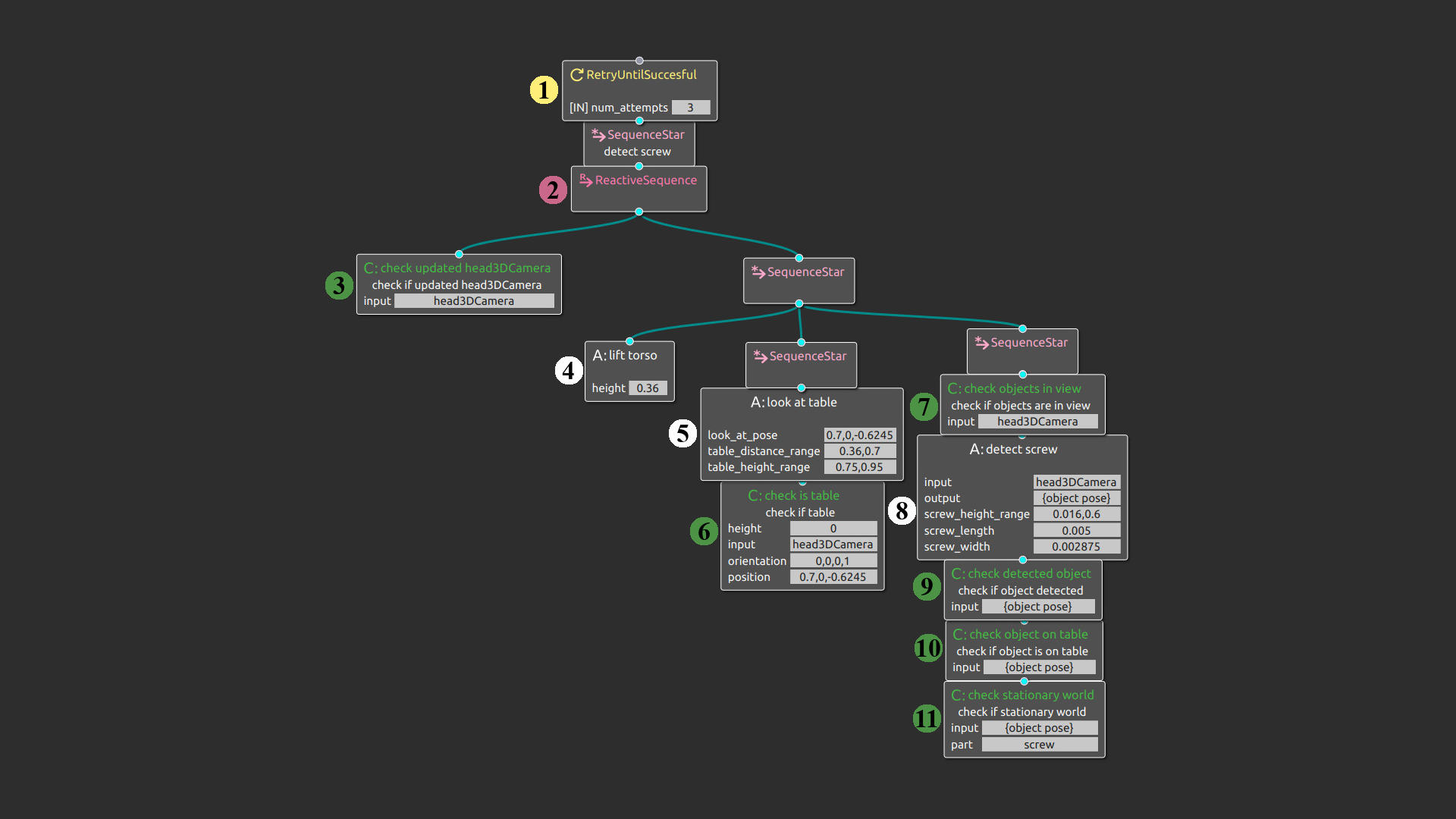
Reactive or Proactive? How Robots Should Explain Failures
Abstract As robots tackle increasingly complex tasks, the need for explanations becomes essential for gaining trust and acceptance. Explainable robotic systems should not only elucidate failures when they occur but also predict and preemptively explain potential issues. This paper compares explanations from Reactive Systems, which detect and explain failures after they occur, to Proactive Systems,…
-
Communicating Missing Causal Information to Explain a Robot’s Past Behavior
-

Projecting Robot Navigation Paths: Hardware and Software for Projected AR
-
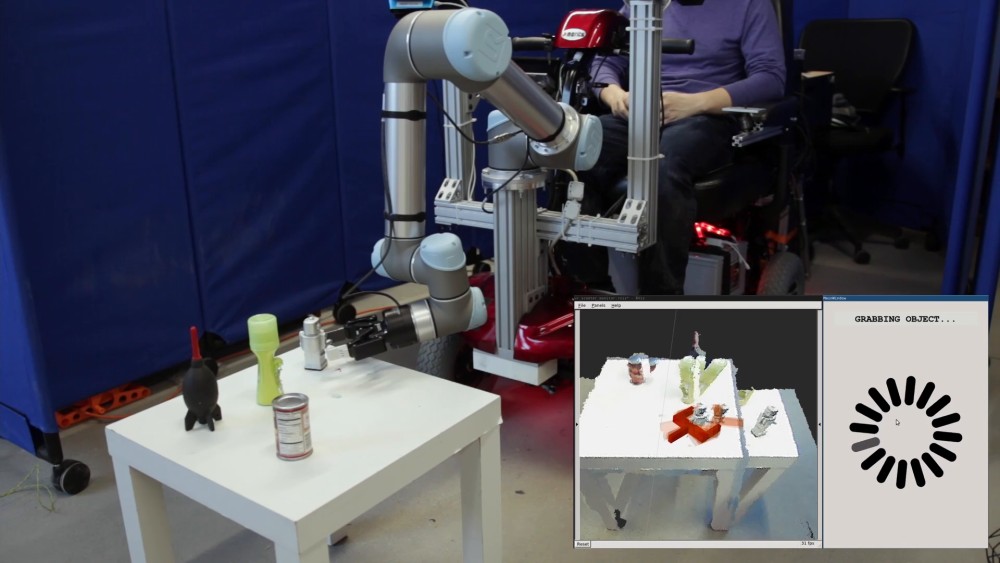
Design Guidelines for Human-Robot Interaction with Assistive Robot Manipulation Systems
-
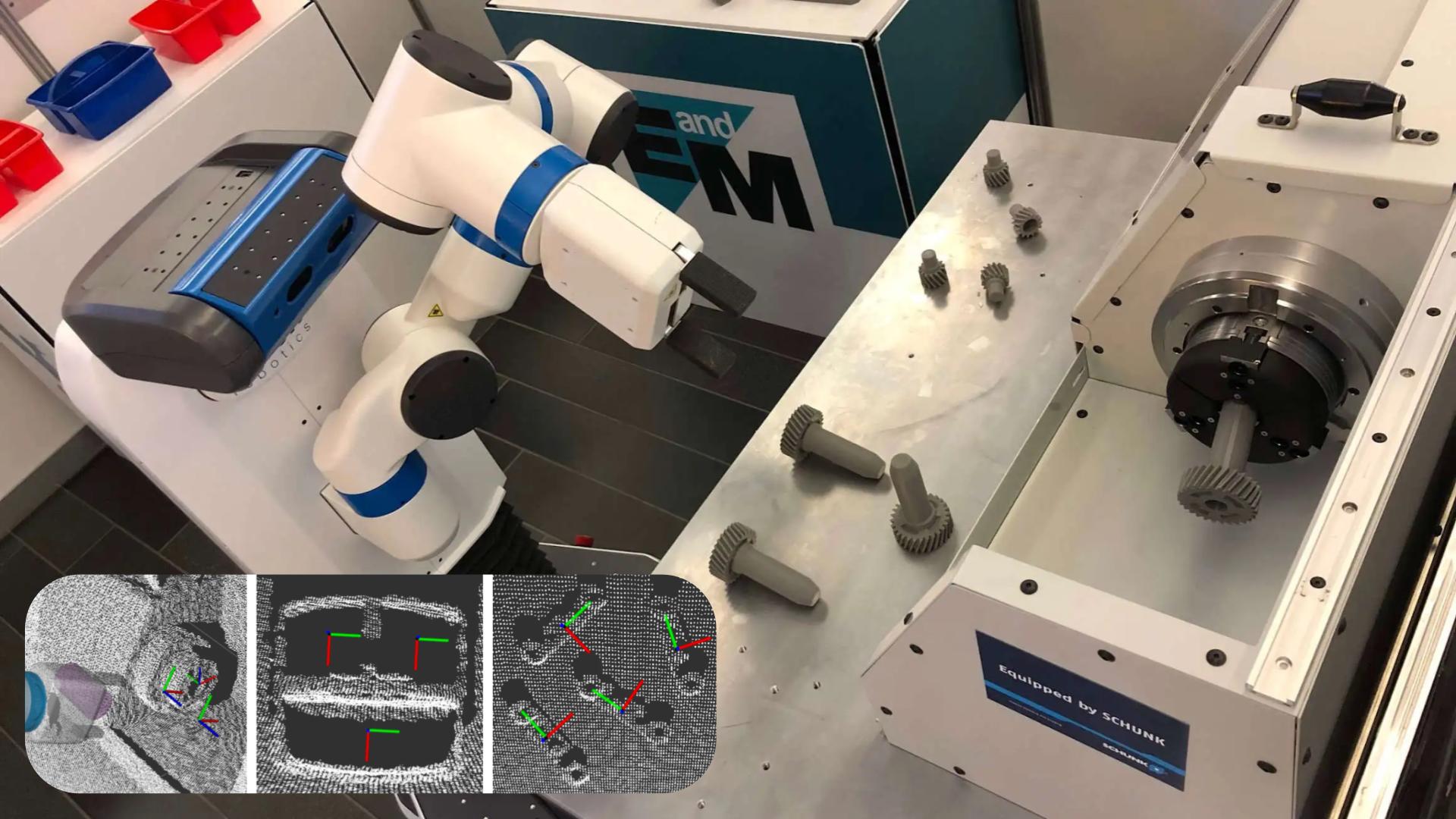
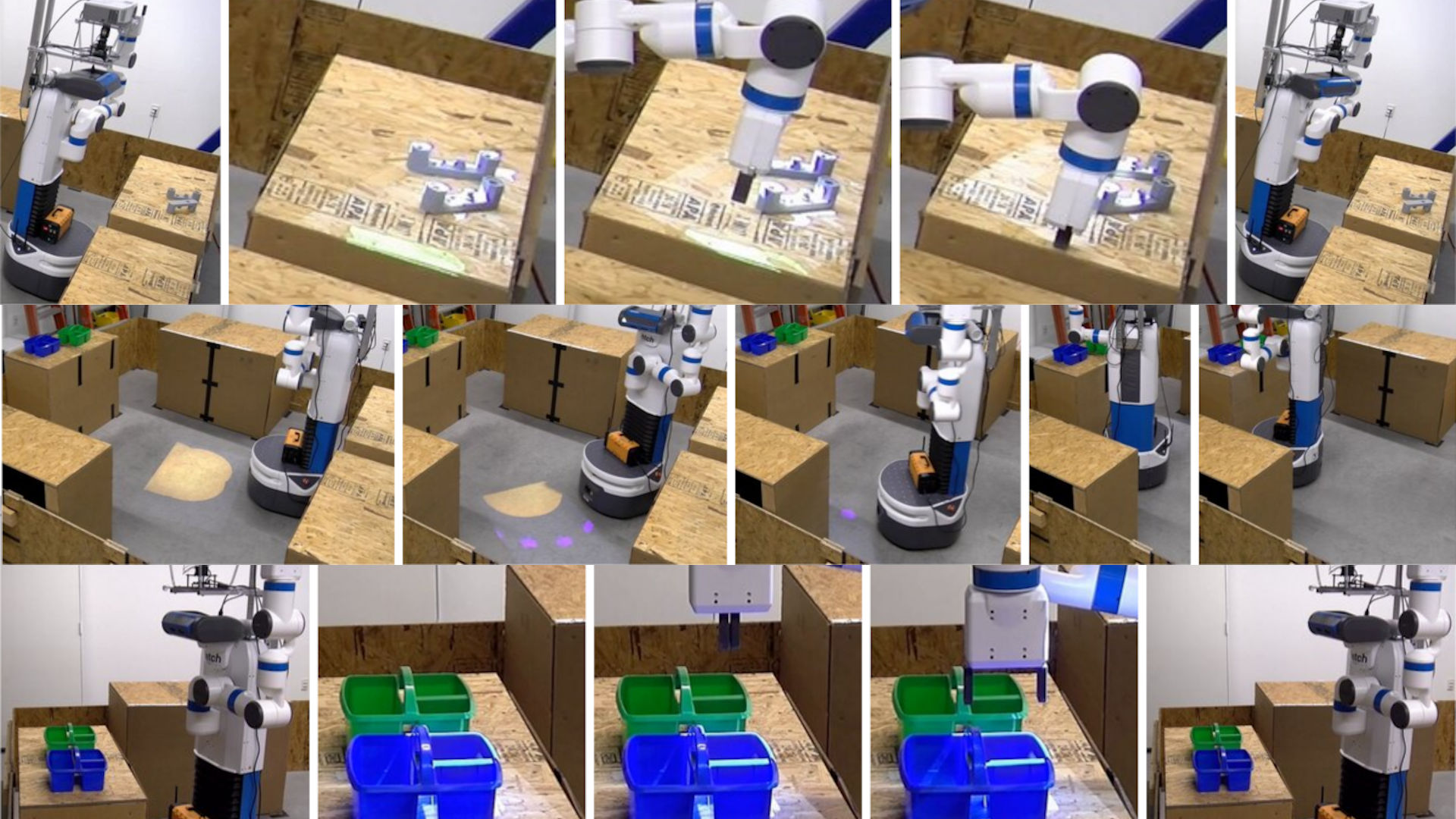
Towards Mobile Multi-Task Manipulation in a Confined and Integrated Environment with Irregular Objects