Research Area: Hardware
-
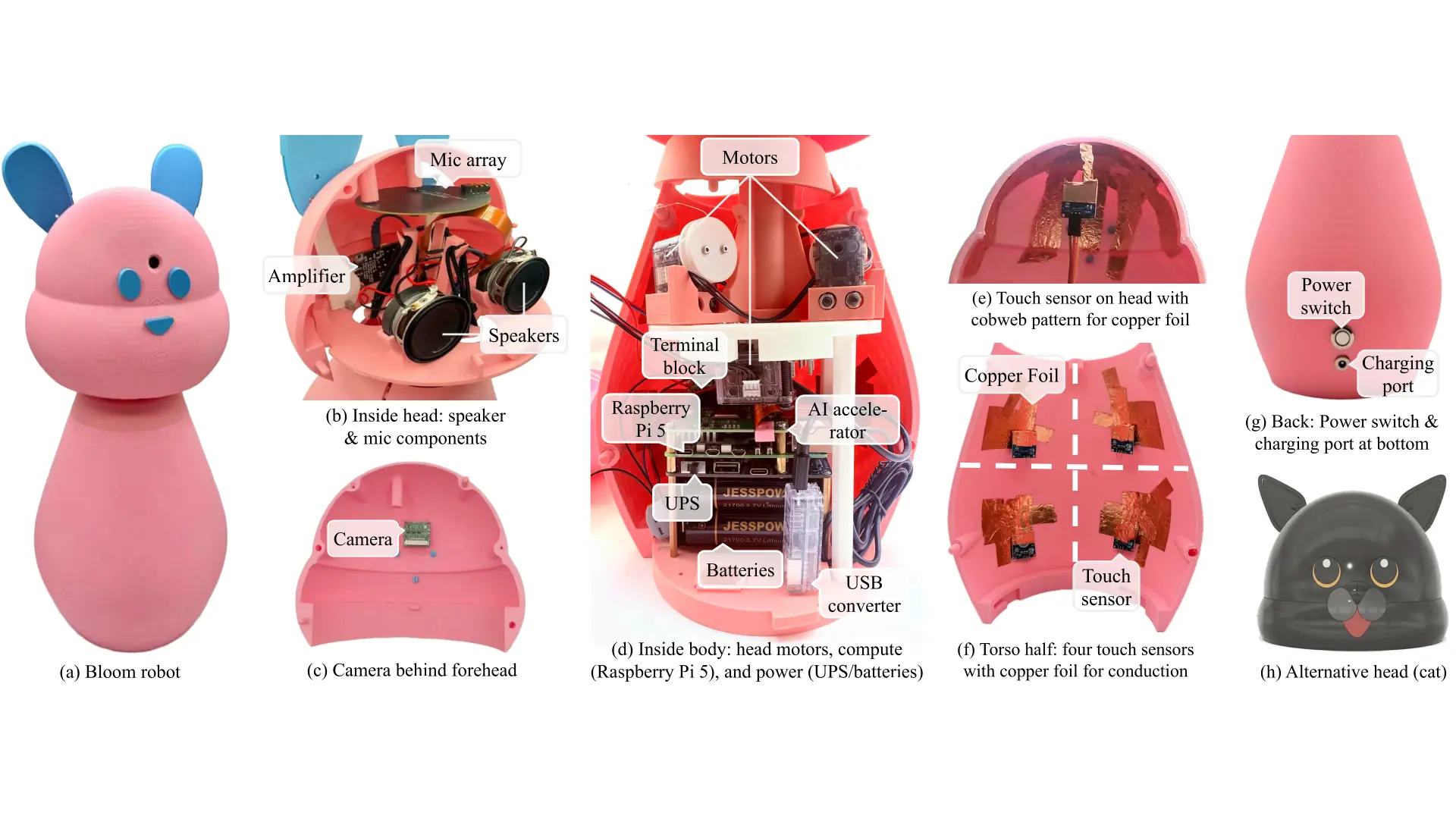
Bloom Preview: A Low-Cost LLM-Powered Social Robot
Abstract HRI research shows that social robots support human companionship and emotional well-being. However, the cost of high-end social robots limits their accessibility, and, yet, existing low-cost platforms cannot fully support users emotionally due to limited interaction capabilities. In this demo paper with accompanying video, we showcase Bloom, a low-cost social robot that combines touch…
-
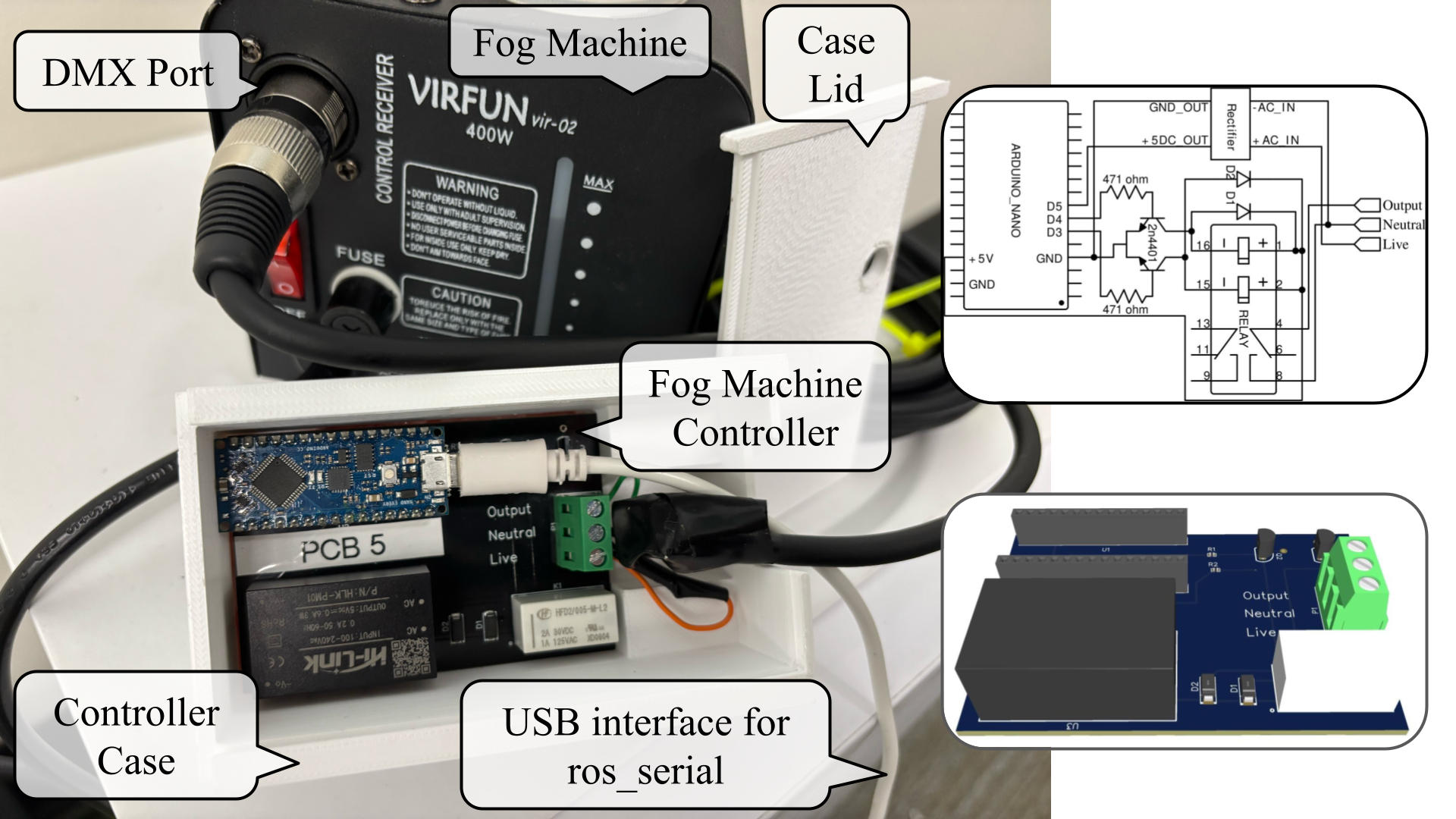
A Controller for Robots to Autonomously Control Fog Machine
Abstract Typical fog machines need manual activation and human monitoring. This creates a problem that robots cannot interface with those fog machines to autonomously controll it for potential augmented reality (AR) applications, e.g., augmented to a fog screen. To solve this issue, we replaced the fog machine’s manual remote with a custom PCB containing an…
-

Anywhere Projected AR for Robot Communication: A Mid-Air Fog Screen-Robot System
Abstract Augmented reality (AR) allows visualizations to be situated where they are relevant, e.g., in a robot’s operating environment or task space. Yet, headset-based AR suffers a scalability issue because every viewer must wear a headset. Projector-based spatial AR solves this problem by projecting augmentations onto the scene, e.g., recognized objects or navigation paths, viewable…
-

Projecting Robot Navigation Paths: Hardware and Software for Projected AR
-

Projection Mapping Implementation: Enabling Direct Externalization of Perception Results and Action Intent to Improve Robot Explainability
-

The Effects of Proactive Release Behaviors During Human-Robot Handovers